

Лекція 16. Тертя в поступальних кінематичних парах
План лекції :
16.1. Види тертя. Тертя ковзання сухих тіл.
16.2. Тертя на похилій площині.
16.3. Тертя в клинчастому І циліндричному жолобі. 16. 4. Тертя, в гвинтовій парі.
16. 1. Види тертя. Тертя ковзання сухих тіл.
При вирішенні багатьох питань, які відносяться до динаміки механізмів і машин, поряд з рушійними силами і силами виробничих опорів приходиться враховувати також і сили тертя.
Загальний опір, що виникає в місцях дотику двох тіл, які переміщаються одне відносно одного, називається силою тертя. Тертя - це складне явище, для пояснення якого створені дві гіпотези: механічна і молекулярна.
За сучасною гіпотезою, що має змішанний характер, процес тертя при ковзанні поверхонь є результатом не лише механічної взаємодії поверхонь, але і результатом дії молекулярних сил.
Ми не будемо зупинятися на сучасних теоріях, які пояснюють природу тертя, а зупинимося тільки на викладенні елементарних відомостей з теорії тертя, необхідних для вирішення простих задач теорії механізмів. В загальному тертя розрізняють таких видів:
а/ чисте - сухе;
б/ граничне, якщо поверхні розділяє шар мастила завтовшки не більше ніж 0,1 Мкм;
в/ рідинне, поверхні певністю розділені шаром мастила;
г/ напівсухе - одночасно сухе і граничне;
д/ напіврідинне - одночасно рідинне і граничне.
По видам рухів розрізняють:
а/ тертя ковзання;
б/ тертя кочення.
Сила Ff сухого тертя, яка виникає при відносному ковзанні одного тіла відносно іншого, пропорційна силі FN нормального тиску і визначається із рівняння Амонтона-Кулона
Ff = f FN,
де f - коефіцієнт тертя ковзання.
Коефіцієнт тертя f залежить від матеріалів поверхонь що труться, їх стану та обробки, мащення та інших факторів.
Не дивлячись на це, коефіцієнт тертя f для конкретних матеріалів приймається сталим.
Сила тертя завжди напрямлена в сторону, протилежну швидкості відносного ковзання тіла.
П овна
реакція
FR
ланки
2 на
ланку
1 визначається
додаванням
нормальної
реакції
FN
і
сили
тертя
Ff
/рис.16.1/.
овна
реакція
FR
ланки
2 на
ланку
1 визначається
додаванням
нормальної
реакції
FN
і
сили
тертя
Ff
/рис.16.1/.
Визначення кута тертя
Рис.16.1
Повна реакція FR відхилена від нормальної реакції FN на кут φ, який називається кутом тертя ковзання
![]() /16.2/
/16.2/
Таким чином, коефіцієнт тертя дорівнює тангенсу кута тертя.
16.2. Тертя на похилій площині.
Знайдемо рушійну силу FР, необхідну для рівномірного переміщення тіла 1, на яке діє гравітаційна сила Fg /сила тяжіння/, вгору на похилій площині 2, якщо коефіцієнт тертя ковзання рівний f . Похила площина і рушійна сила FР складають з горизонталлю кути, відповідно α і β /рис.16.2,а/.
При рівномірному переміщенні тіла 1 на похилій площині 2 вгору на нього діють: рушійна сила FР, сила тяжіння Fg, нормальна реакція FN та сила тертя Ff .
Знайдемо повну реакцію FR шляхом додавання нормальної реакції FN та сили тертя Ff . Реакція FR складає з нормаллю до площини кут тертя φ.
Складемо векторне рівняння всіх сил, що діють на тіло 1:
![]() /16.3/
/16.3/
Тіло на похилій площині

а - переміщення тіла вгору; б - план сил
Рис. 16. 2
Побудуємо план сил /рис. 16. 2, б/. Отримаємо замкнутий силовий трикутник із відповідними кутами при вершинах. На основі теореми синусів можна записати:
![]() /16.4/
/16.4/
Звідси знайдемо рушійну силу
![]() /16.5/
/16.5/
Якщо сила FР горизонтальна, кут β=0, то рівняння /16.5/ прийме вигляд:
![]() /16.6/
/16.6/
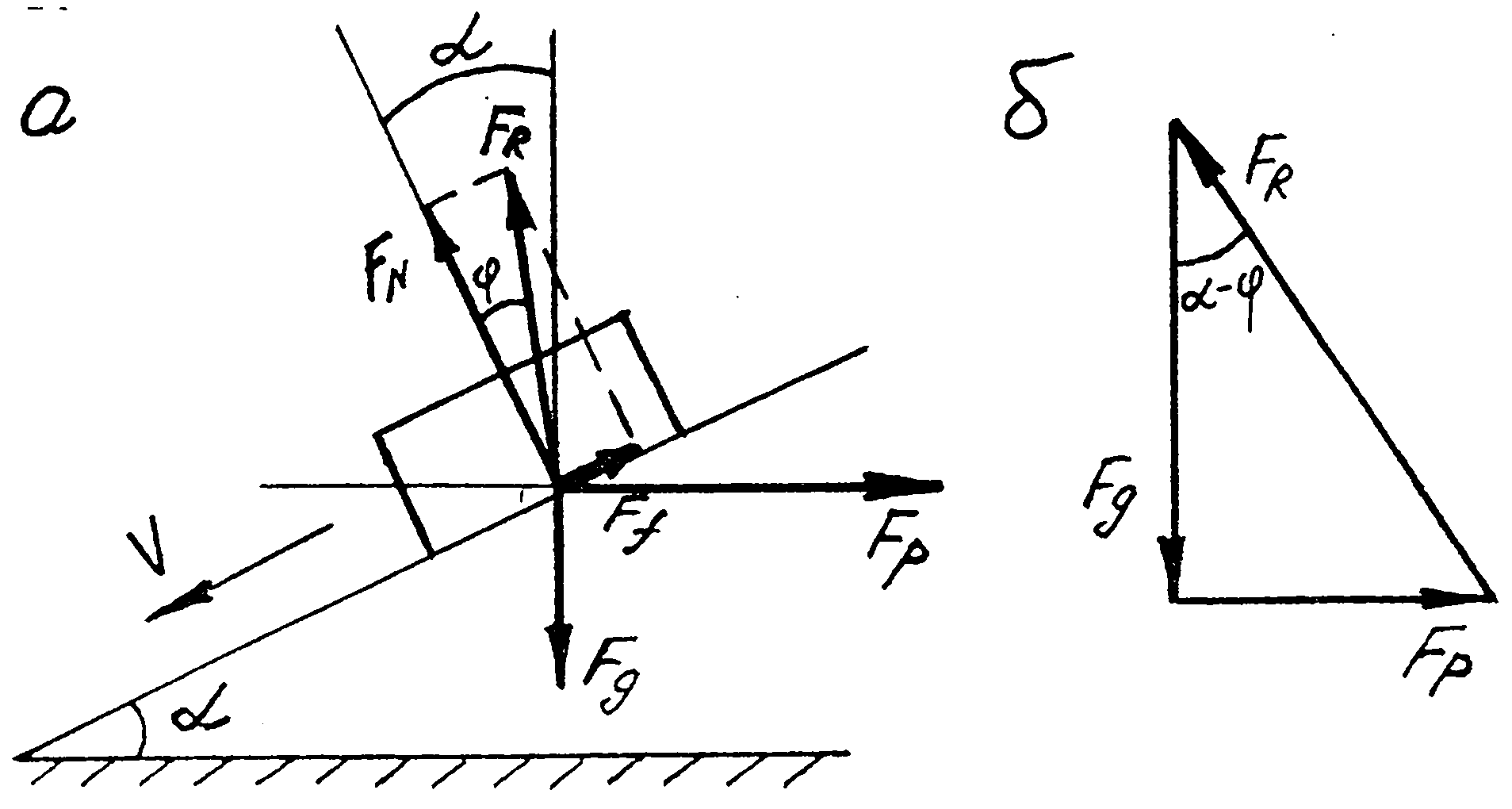
Розглянемо випадок, коли тіло 1 рухається рівномірно донизу /рис.16.З,а/.
В цьому разі побудова відрізняється від попередньої тим, що сила тертя Ff напрямлена вверх, а повна реакція FR відхиляється на кут тертя φ, не ліворуч від нормалі /рис. 16. 2, а/, а праворуч від неї /рис.16.3,а/.
Для цього випадку досить у формулах /16.5/ і /16.6/ замінити кут φ на –φ. Тоді будемо мати:
![]() /16.7/
/16.7/
![]() /16.8/
/16.8/
 Тіло
на похилій площині
Тіло
на похилій площині
а - переміщення тіла донизу; б - план сил
Рис. 16. З
Рівняння /16.8/ також випливає із /рис. 16. З, б/.
При відсутності тертя /кут φ = 0/ рівняння /16.8/ набере вигляду:
![]() /16.9/
/16.9/