

23.2. Графік зведеного динамічного моменту інерції механізму.
Побудуємо графік зведеного динамічного моменту інерції механізму за цикл Ізв = Ізв(φ) рис.23.1,г/.
Числові значення зведеного динамічного моменту інерції для кожного механізму визначаються із формули, яка виводиться із умови рівності кінетичних енергій /див. лекція 21, питання 4/.
Визначимо масштаб графіка зведеного динамічного моменту інерції:
![]() /23.7/
/23.7/
де Ізві - зведений динамічний момент інерції механізму в і-му положенні; Xi - відрізок в мм на рис.23.1,г, що зображає цей момент Ізві.
Графіки для визначення динамічного моменту інерції маховика
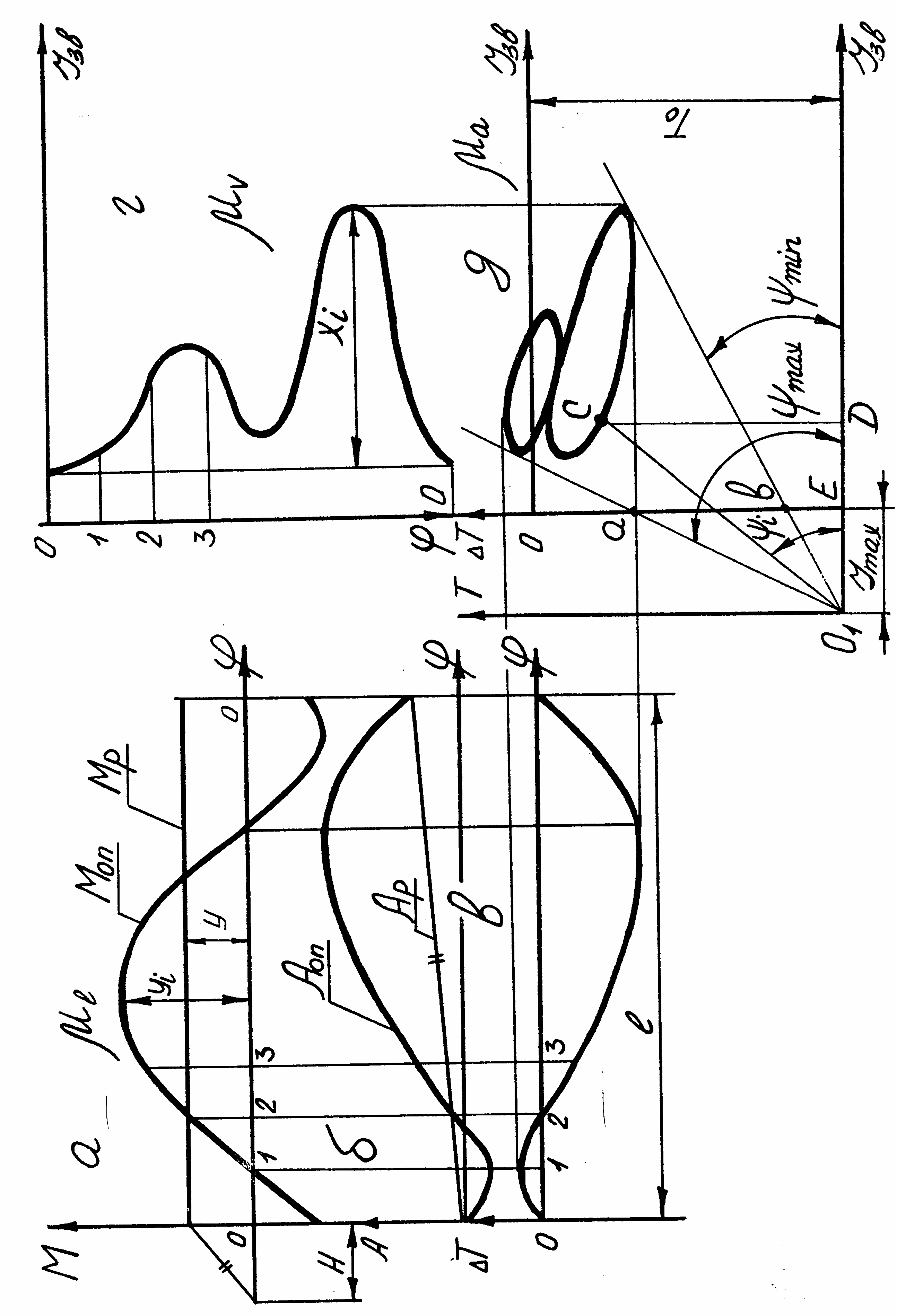
Рис.23.1
23.3. Діаграма енергомас.
Побудуємо
діаграму
енергомас
![]() /рис.23.1,д/.
Цю
діаграму
будуємо
графічним
складанням
графіків
приросту
кінетичної
енергії
механізму
/рис.23.1,в/
і
зведеного
динамічного
моменту
інерції
механізму
Ізв
= Ізв(φ)
рис.23.1,г/
методом
виключення
параметру
φ
.
/рис.23.1,д/.
Цю
діаграму
будуємо
графічним
складанням
графіків
приросту
кінетичної
енергії
механізму
/рис.23.1,в/
і
зведеного
динамічного
моменту
інерції
механізму
Ізв
= Ізв(φ)
рис.23.1,г/
методом
виключення
параметру
φ
.
Проведемо
дотичні
до
діаграми
енергомас
під
кутами
ψmax
і
ψmin
/рис.23.1,д/.
Отримаємо
на
перетині
цих
дотичних
з
віссю
відрізок,
який
позначимо
![]() .
.
Визначимо кути ψmax і ψmin .Точка 01- перетину дотичних буде початком нових осей координат діаграми повної кінетичної енергії всього механізму у функції повного зведеного динамічного моменту інерції механізму з маховиком.
Для будь-якої точки С діаграми енергомас можна записати:
О1Д = ЕД + О1Е, /23.8/
де О1Д - відрізок, що зображає повний зведений динамічний момент інерції механізму з маховиком; ЕД - відрізок, що зображає зведений динамічний момент інерції механізму; О1Е - відрізок, що зображає момент інерції маховика.
Із трикутника О1СД маємо:
![]() /23.9/
/23.9/
Визначимо кутову швидкість вхідної ланки в будь-якому і-му положенні механізму. Із рівняння кінетичної енергії маємо:
![]() /23.10/
/23.10/
де Ті = СД * μ , Ізві = О1ДμІзв.
Підставимо значення Ті і Ізві в рівняння /23.10/, отримаємо:
 /23.11/
/23.11/
Враховуючи відношення /23.9/, знайдемо:
 /23.12/
/23.12/
Підставимо
в рівняння /23.12/ значення ωmax
і
ωmin
із
/22.13/
і /22.14/. Знайдемо ψmax
i
ψmin.
Зважаючи на малу величину коефіцієнта
δ,
членом
![]() нехтуємо.
Тоді отримаємо:
нехтуємо.
Тоді отримаємо:

 /23.13/
/23.13/
23.4. Динамічний момент інерції та геометричні розміри маховика. Визначимо динамічний момент інерції маховика Imaх. із рис.23.1,д:
Imax = O1E * μIзв /23.14/
Таким чином, вимірюючи в міліметрах безпосередньо із рис.23.1,д відрізок 01Е за формулою /23.14/ визначимо динамічний момент інерції маховика. Проте при малому значенні коефіцієнта нерівномірності δ точка перетину О1 дотичних може вийти за межі рисунка. Значно простіше користуватися відрізком ав. Із рисунка видно, що:
aE = O1Etgψmax i bE = O1Etgψmin.
Віднімемо від першого рівняння друге, отримаємо:
aE – bE = O1E(tgψmax – tgψmin). /23.15/
Із відношення /23.15/ знаходимо:
![]() /23.16/
/23.16/
Підставимо значення ψmax і ψmin. із /23.13/ і 0ІЕ із /23.14/ в формулу /23.16/, отримаємо:
 /23.17/
/23.17/
Звідки знаходимо:
 /23.18/
/23.18/
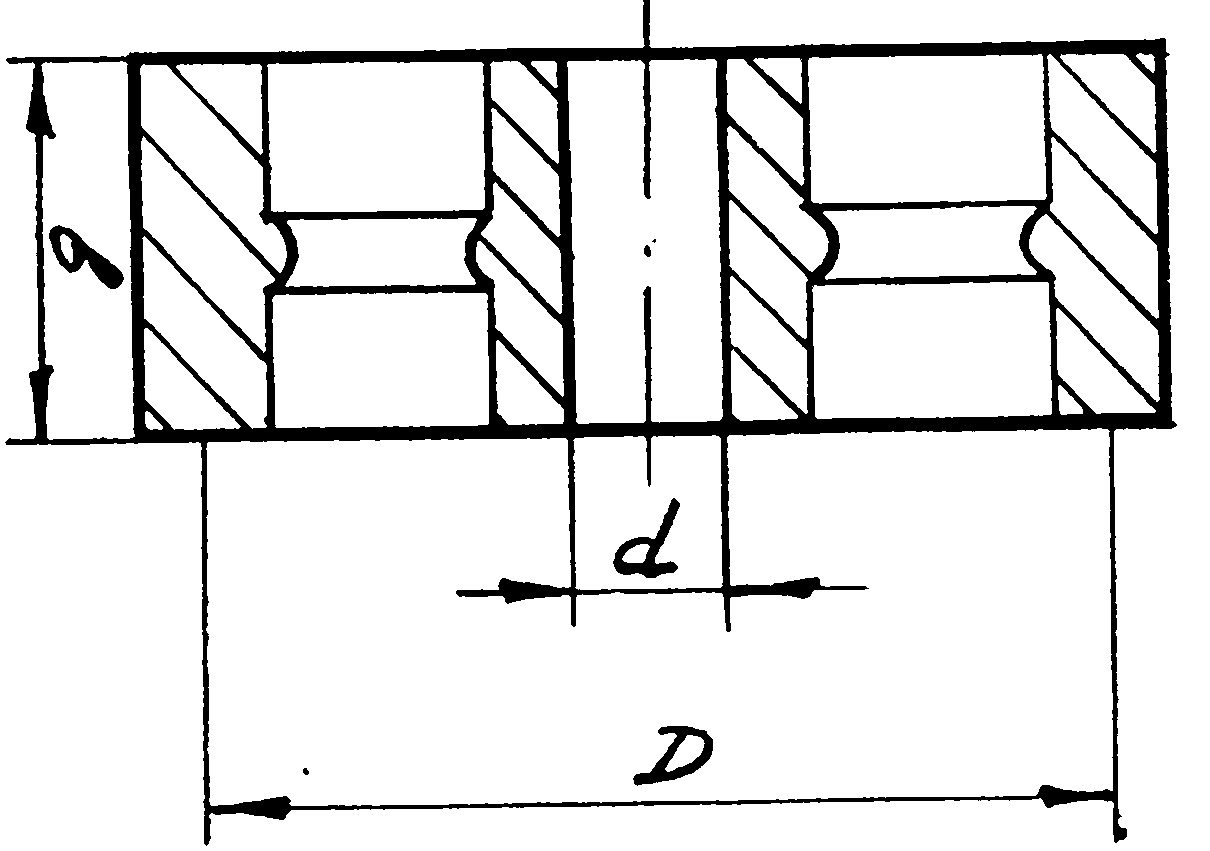
Визначимо геометричні розміри маховика.
Вважаємо,
що
маса
маховика
рівномірно
розподілена
по
колу
діаметра
D,
а
також
нехтуємо
моментами
інерції
маточини
і
спиць,
оскільки вони
відносно
невеликі
/рис.23.2/.
Момент
інерції
![]() можна
подати так:
можна
подати так:
![]() /23.19/
/23.19/
Ескіз маховика
Рис.23.2.
Якщо врахувати моменти інерції маточини і спиць, то:
Inmax = 1.1 Imax /23.20/
Вираз тD2 називається маховим моментом, або характеристикою маховика. Задаючись діаметром D маховика, величина якого визначається з конструктивних міркувань, можна легко визначити масу маховика. Щоб запобігти небезпеці можливого розриву маховика, його діаметр вибирають таким, щоб колова швидкість на ободі не перевищувала допустимої, для матеріалу маховика величини. Наприклад, для чавунного маховика допустима швидкість V = ЗО м/с.
Якщо маховик встановити не на вхідній ланці механізму, а на якій-небудь і-й його ланці, то з умови рівності кінетичних енергій маємо:
![]()
Звідки:
![]() /23.21/
/23.21/
де
![]() -
динамічний
момент
інерції
маховика,
встановленого
на
і-й
ланці; ωі
кутова швидкість
цієї
ланки.
-
динамічний
момент
інерції
маховика,
встановленого
на
і-й
ланці; ωі
кутова швидкість
цієї
ланки.
Якщо між вхідною ланкою і двигуном встановлено редуктор з передаточним числом UР , то момент інерції маховика на валу двигуна буде:
![]() /23.22/
/23.22/
Необхідна, потужність двигуна на вхідній ланці:
Nдв = Mp * ωcp, /23.23/
де Мр = у * μМ.
Механізм з маховиком при усталеному русі працює таким чином. В тих положеннях механізму /в більшості при холостому ході/, коли момент рушійних сил більший за момент сил опору /Мр>Моп/ збільшується кутова швидкість вхідної ланки і тоді, маховик, завдяки своєму значному динамічному моменту інерції, сприймає надлишок кінетичної енергії механізму і не дозволяє кутовій швидкості надмірно зростати. В положеннях механізму /в більшості при робочому ході/, коли момент сил опору більший за момент рушійних сил / Моп > Мр /, маховик віддає накопичену кінетичну енергію, протидіючи зменшенню кутової швидкості вхідної ланки. Отже, призначення маховика - це регулювання в заданих межах періодичних коливань кутової швидкості вхідної ланки механізму при усталеному русі. Крім того, маховик дозволяє зменшити потрібний рушійний момент, а значить зменшити і необхідну потужність двигуна.