

17.3.2. Переміщення вантажу на візку.
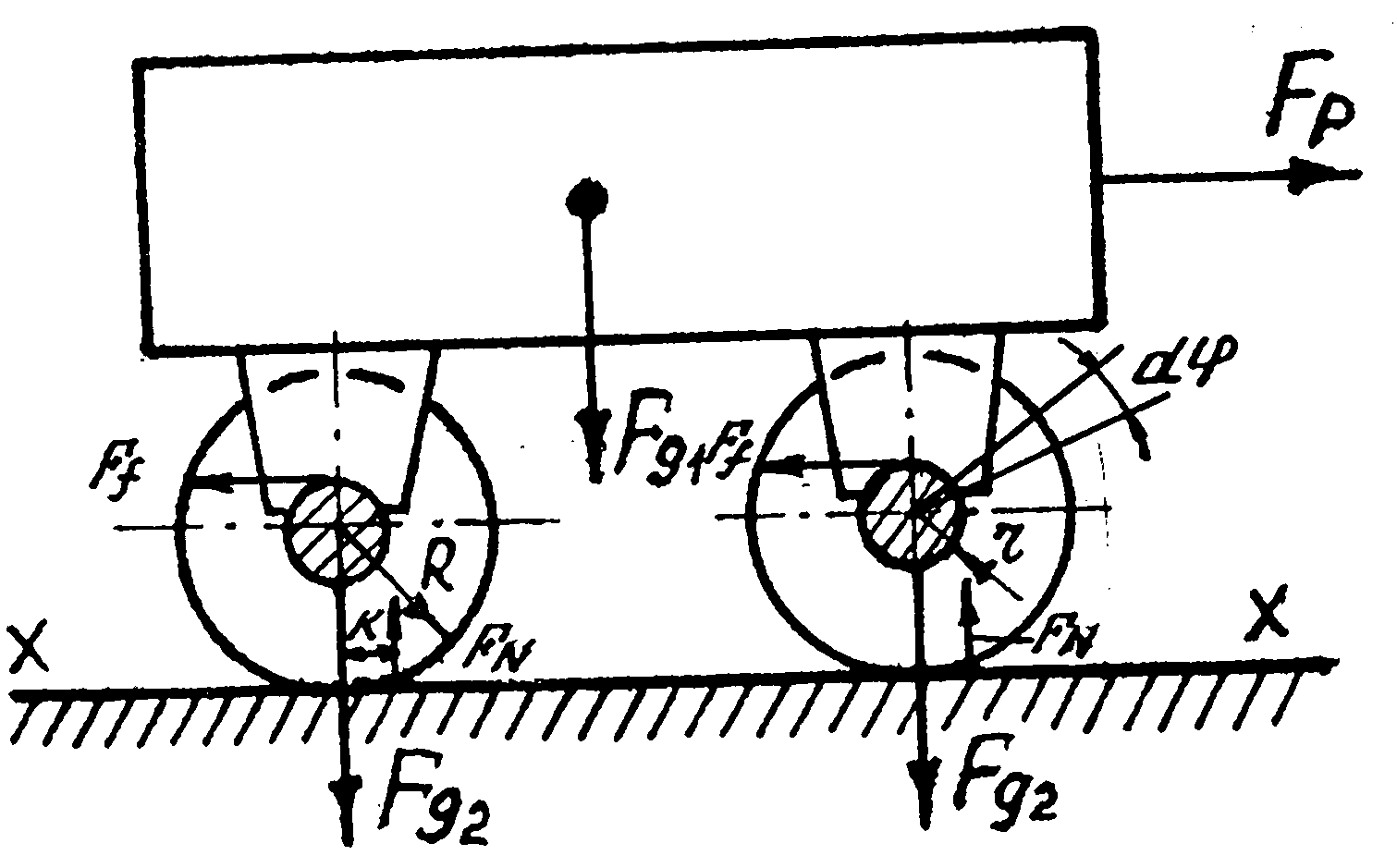
Знайдемо горизонтальну рушійну силу Fρ , необхідну для рівномірного переміщення візка з вантажем, сила тяжіння якого Fg1, a сила тяжіння кожного із коліс Fg2, /рис. 17.5/. Позначимо радіуси: колеса R , цапфи r .
Прирівняємо елементарну роботу рушійної сили Fρ на елементарному переміщенні dx до суми елементарних робіт від моменту тертя кочення коліс відносно площини x - x і від моменту тертя ковзання в цапфах коліс, отримаємо: Ар=Ax-x+Afц.
 Вантаж
на візку
Вантаж
на візку
Рис.17.5
![]() /17.33/
/17.33/
Знайдемо елементарне переміщення
![]() /17.34/
/17.34/
Підставимо в рівняння робіт /17.33/ значення dx із /17.34/, отримаємо:
![]() /17.35/
/17.35/
звідси маємо:
![]() /17.36/
/17.36/
Подамо ряд значень коефіцієнту тертя кочення K при певних умовах тертя:
Умови тертя Коефіцієнт К, мм
Стальні бандажі коліс залізничних вагонів відносно рейок 0.5...0.55
Дерево відносно дерева 0.5...1.3
Загартовані стальні кульки і ролики в підшипниках кочення 0.01
Колеса візків із залізними шинами відносно асфальту 6 Те саме відносно піску 15...30
Лекція 18.
Сили інерції в механізмах.
План лекції:
18.1. Загальні положення.
18.2. Визначення сил інерції ланок плоских механізмів.
18.3. Зведення сил інерції ланки до центру коливання.
18.4. Метод заміщених точок.
18.І. Загальні положення.
Внаслідок руху ланок механізму з прискореннями в кінематичних парах виникають додаткові динамічні зусилля. Для визначення цих зусиль кожну ланку механізму слід зрівноважити прикладанням до неї у відповідній точці фіктивної сили і фіктивного моменту пари сил, які за величиною рівні силі і моменту пари сил, що визивають прискорений рух ланки. Цю фіктивну силу називають масовою силою, або силою інерції Fі, а фіктивний момент пари сил - моментом пари сил інерції Mi.
Слід підкреслити, що ніякої сили інерції Fі і ніякого моменту пари сил інерції Mi до ланки в дійсності не прикладено. Сила Fі момент Mi не мають ніякого фізичного змісту, а в розрахунках виконують роль не більше, ніж чисто математичних величин, за допомогою яких враховується вплив прискореного руху ланок на додаткові динамічні зусилля в кінематичних парах.
18.2. Визначення сил інерції ланок плоских механізмів.
Ланка механізму складається з окремих матеріальних точок, прискорення яких в загальному випадку складного руху різні. Тому різні і елементарні сили інерції, умовно прикладені в цих точках. Система елементарних сил інерції матеріальних точок ланки, яка здійснює плоскопаралельний рух і має площину симетрії, паралельну площині руху, зводиться до головного вектора Fі, який прикладений у центрі мас ланки, і до головного моменту Mi пари сил інерції.
Головний вектор сил інерції:
![]() /18.1/
/18.1/
де
т
- маса
ланки,
кг;
![]() - вектор
повного
прискорення
центра
мас S
ланки,
м/с2.
З
рівності
/18.1/ випливає,
що
сила
інерції
Fі
вимірюється
в Н.
Напрям
сили
інерції
Fі.
протилежний
напряму
вектора
прискорення
.
На
це
вказує
знак
"-" в
/18.1/.
- вектор
повного
прискорення
центра
мас S
ланки,
м/с2.
З
рівності
/18.1/ випливає,
що
сила
інерції
Fі
вимірюється
в Н.
Напрям
сили
інерції
Fі.
протилежний
напряму
вектора
прискорення
.
На
це
вказує
знак
"-" в
/18.1/.
Момент Mi пари сил інерції спрямований протилежно кутовому прискоренню ε і визначається за формулою:
![]() /18.2/
/18.2/
де Іs – динамічний момент інерції ланки, що дорівнює добутку маси т ланки на квадрат його радіуса інерції ρЅ відносно центра мас Ѕ
![]() /18.3/
/18.3/
Момент інерції Іs вимірюють в кгм2, а кутове прискорення ε – в рад/с2. Oтже, момент Мі пари сил інерції вимірюється в НМ. Площина, в якій він діє, паралельна площині руху ланки.