

12.3 Гвинтові зубчасті колеса .
Механізм гвинтових зубчастих коліс застосовують у тих випадках, коли треба передати рухи між валами, які схрещуються, із сталим передаточним відношенням .
Передаточне відношення пари гвинтових коліс U12 = 1...7.
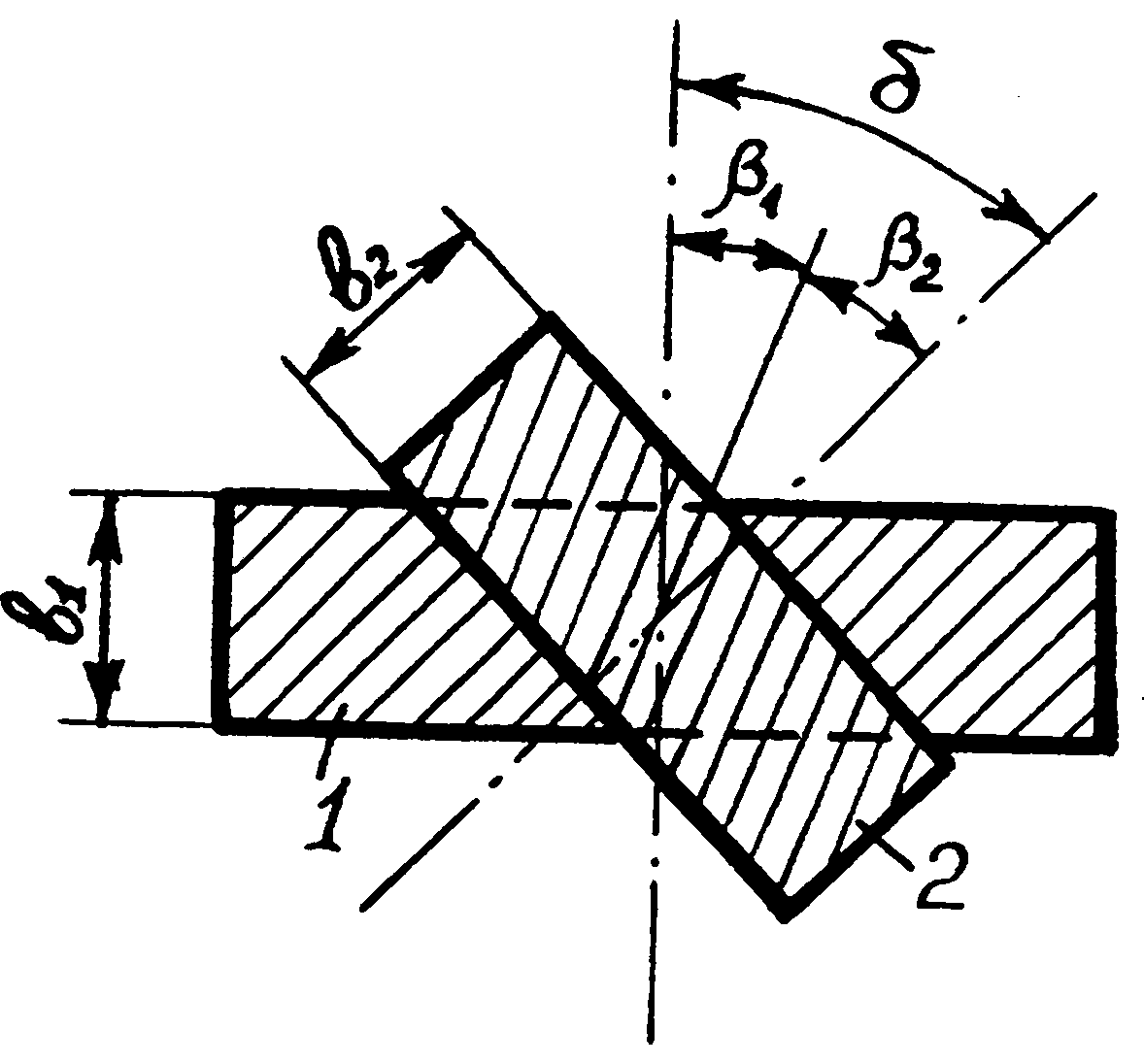
Гвинтові колеса так само, як і косо зубі циліндричні колеса, мають гвинтові зубці, нахилені до відповідних осей під кутом β1 і β2 /рис. 12.4/.
β1+ β2 = .
 Гвинтові
колеса
Гвинтові
колеса
Рис.12.4
Передаточне відношення :
![]() /12.24/
/12.24/
Розміри елементів гвинтових коліс визначаються, виходячи із нормального модуля mn аналогічно як і для косозубих циліндричних коліс. Гвинтові колеса використовують при невеликих швидкостях і незначних потужностях як другорядні передачі в машинах /у передачах до розподільчих валів двигунів, до паливних насосів і двигунів та ін./.
12. 4. Поняття про нові види зубчастого зачеплення.
В 1955 році професор Новіков запропонував новий вид зубчастого зачеплення /рис. 12.5/. Випробування цього зачеплення показали, що його несуча здатність в 2 ... 3 рази більша, ніж евольвентного. У цих передачах теоретичне стикання зубців відбувається в точці. Ця точка під час роботи передачі переміщується по лінії, паралельній осям коліс. Безпреривність руху в цих передачах можна забезпечити тільки застосуванням косозубих коліс. У кожному перерізі, перпендикулярному до осі колеса, є тільки одна точка зачеплення, замість дільниці, а тому дільниця зачеплення перетворюється в точку і отже коефіцієнт перекриття прямозубої передачі в торцовому перерізі дорівнює нулеві. Повний коефіцієнт перекриття цієї передачі буде дорівнювати членові рівняння /11.43/ як для косозубої передачі.
![]() .
/12.25/
.
/12.25/
Через те, що зубці стикаються в одній точці висота їх теоретично може дорівнювати нулеві, практично може бути невеликою, а профілі зубців різноманітними. Завдяки цьому, напруження згину значно менші, ніж в евольвентному зачепленні. В такій передачі зубці шестерні виготовляють випуклими з радіусом профілю зубця ρ1= 1,35 ms. Центр якого знаходиться в точці Р. Вогнуті профілі зубів більшого колеса описуються по дузі кола радіуса ρ2=/1,03...1,10/ ρ1 із центром в точці М, яка лежить на прямій N-N. Завдяки малій різниці радіусів ρ1 і ρ2 профілі зубів на деякій частині їх майже співпадають, а тому не зважаючи на точковий контакт, зменшується питомий тиск на зубці.
Зачеплення Новікова
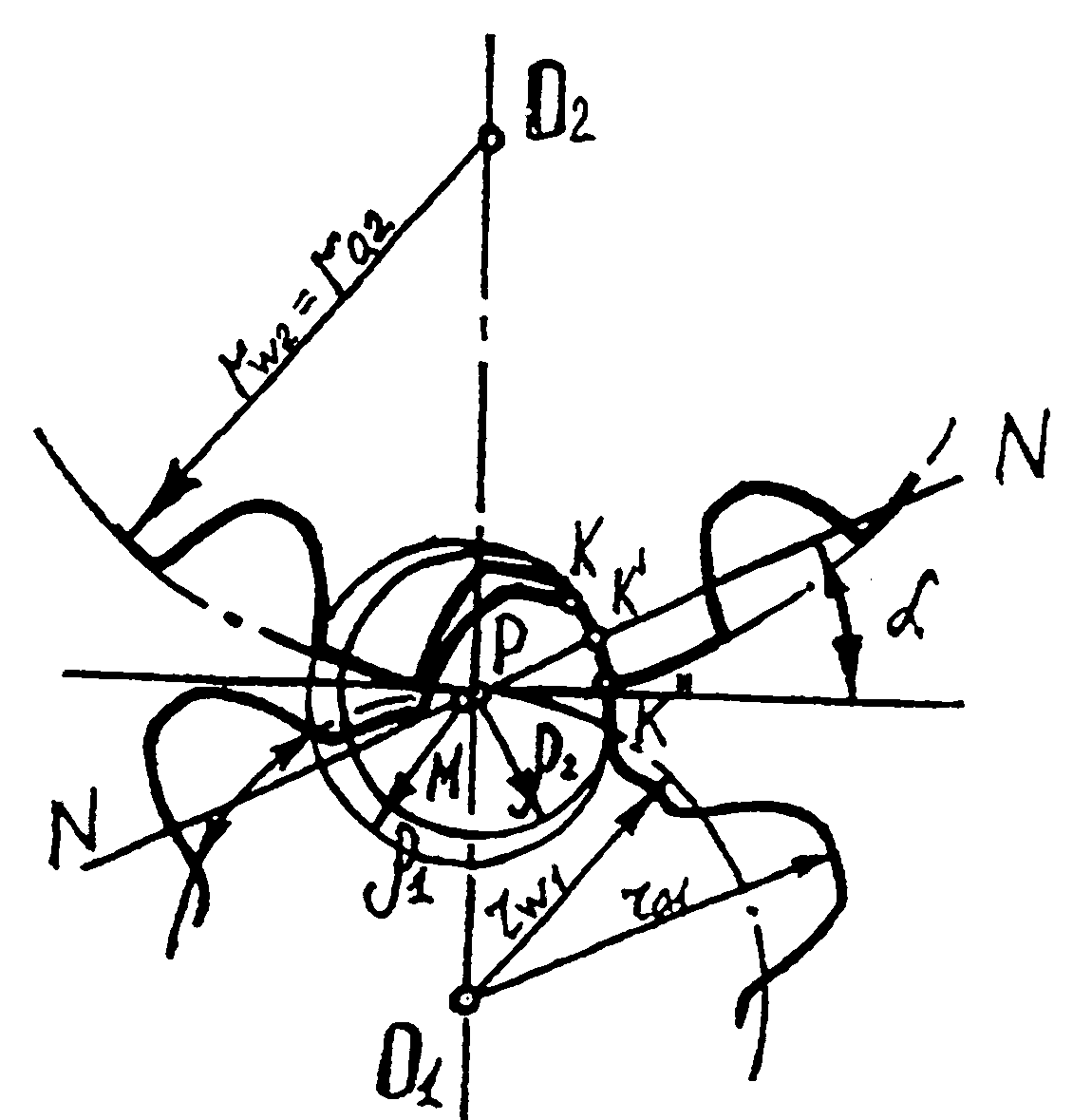
Рис.12.5
Формули для визначення геометричних розмірів такої передачі:
ra1 = rw1+(0.8…0.9) ρ1; ra2 = rw2 ; /12.26/
rf1=rw1 -(0.2…0.4) ρ1; rf2=aw-ra1-c,
Де С – раціональний зазор; С=/0,1...0,2/ ρ1.
Sw1+Sw2<Pws; Sw1=(1.3…1.5)Sw2. /12.27/
Виготовлення таких коліс має певні труднощі, окрім того, щоб передача працювала /ε >1,0/,ширина колеса повинна задовольняти умові:
b >Ps/tgB.
Лекція 13.
Складні зубчасті механізми