

9.3.2.Визначення початкового радіуса профілю кулачка для кулачкових механізмів з тарілчастим штовхачем.
Кулачковий
механізм з плоским штовхачем має
працювати тільки при випуклому кулачку.
Тобто профіль кулачка повинен бути
тільки випуклим: радіус кривизни профілю
в будь – якій точці повинен бути більше
нуля
![]() /9.14/. Задача визначення початкового
радіуса вперше була вирішена проф.
Геронімусом.
/9.14/. Задача визначення початкового
радіуса вперше була вирішена проф.
Геронімусом.
Для кулачкового механізму з тарілчастим штовхачем побудуємо замінюючий механізм /рис.9.6, а/.
Кулачковий
механізм з тарілчастим штовхачем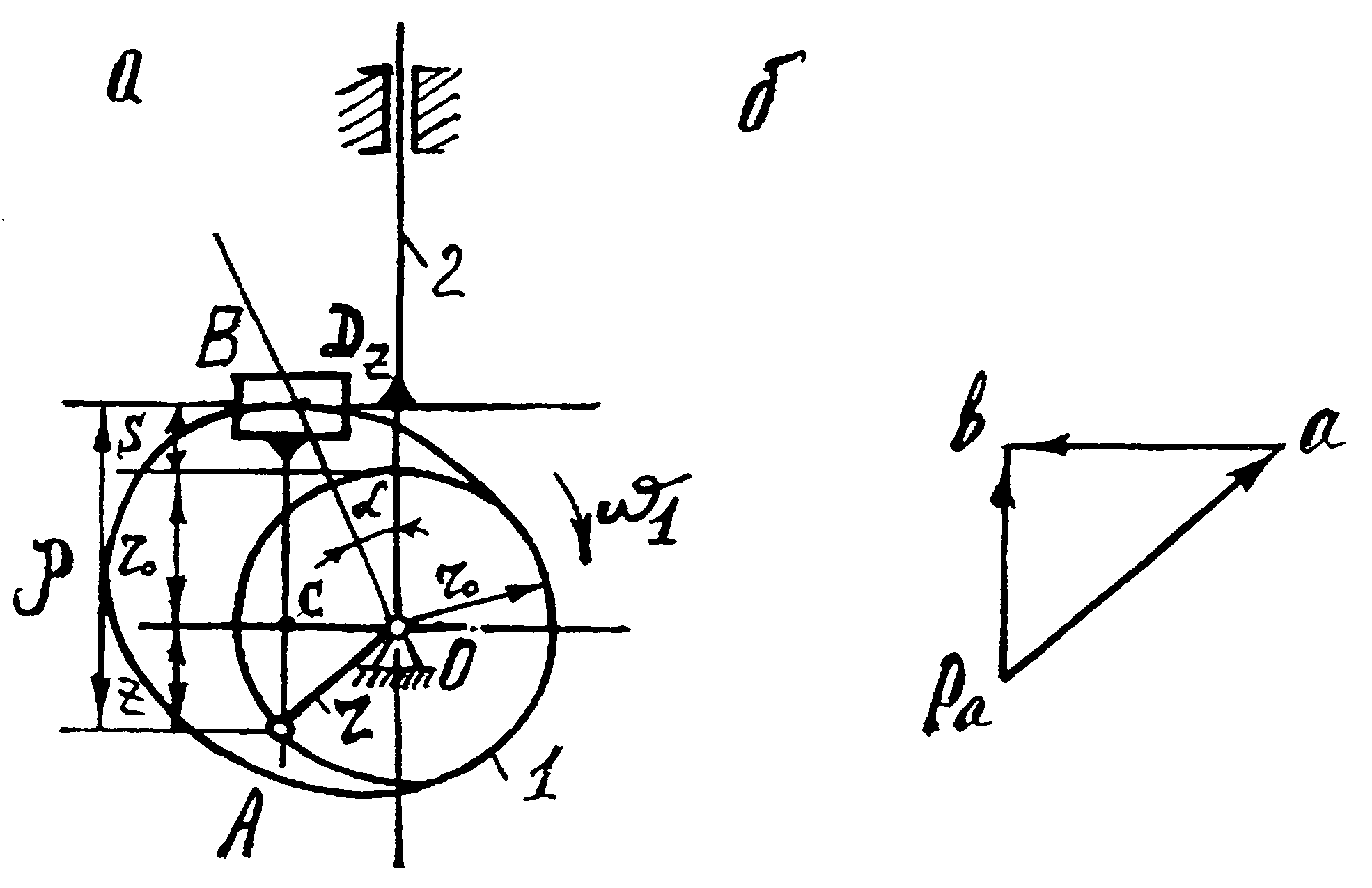
Рис. 9.6
Побудуємо план прискорень для замінюю чого механізму /рис.9.6, б/.
Запишемо рівняння для визначення прискорень точок А і В
![]() /9.15/
/9.15/
![]() /9.16/
/9.16/
Проведемо лінію ОС, паралельно тарілці штовхача. Позначимо відрізок АС = Z /рис.9.6, а/. Із рисунка 9.6 видно, що трикутник ОАС і аРаВ подібні, внаслідок паралельності відповідних сторін. Із подібності трикутників маємо:
![]() /9.17/
/9.17/
я![]() кщо
кщо
![]() і
і
![]() ,
то із рівняння /9.16/ випливає:
,
то із рівняння /9.16/ випливає:
/9.18/
Радіус кривизни профіля кулачка в точці В контакту з штовхачем
![]() /9.19/
/9.19/
В![]() раховуючи
значення Z із /9.18/ отримаємо:
раховуючи
значення Z із /9.18/ отримаємо:
/9.20/
Я![]() кщо
згідно /9.14/ ρ>0,
то
кщо
згідно /9.14/ ρ>0,
то
/9.21/
П![]() ерепишемо
нерівність /9.21/ так
ерепишемо
нерівність /9.21/ так
 /9.22/
/9.22/
Розділимо /9.22/ на r0+S
/9.23/
О скільки
tg 45º=1,
то нерівність /9.23/ прийме вид:
скільки
tg 45º=1,
то нерівність /9.23/ прийме вид:
/9.24/
Н![]() ерівність
/9.21/ може не виконуватися тільки при
від’ємних значеннях
ерівність
/9.21/ може не виконуватися тільки при
від’ємних значеннях
причому тільки тоді, коли абсолютне значення Z більше від абсолютного значення r0+S.
Відкладемо відрізок Z від осі штовхача /рис. 9.6, а/ вліво вздовж його кромки. Сполучимо кінець цього відрізку т.Д з центром 0.
І![]() з
рисунка видно, що поки кут α<45º,
нерівність /9.21/ буде виконуватись тому,
що z<r0+S.
з
рисунка видно, що поки кут α<45º,
нерівність /9.21/ буде виконуватись тому,
що z<r0+S.
Побудуємо діаграму Для цього, користуючись діагра-мою S=S(φ) /рис. 9.1/ визначимо в кожному положенні значення
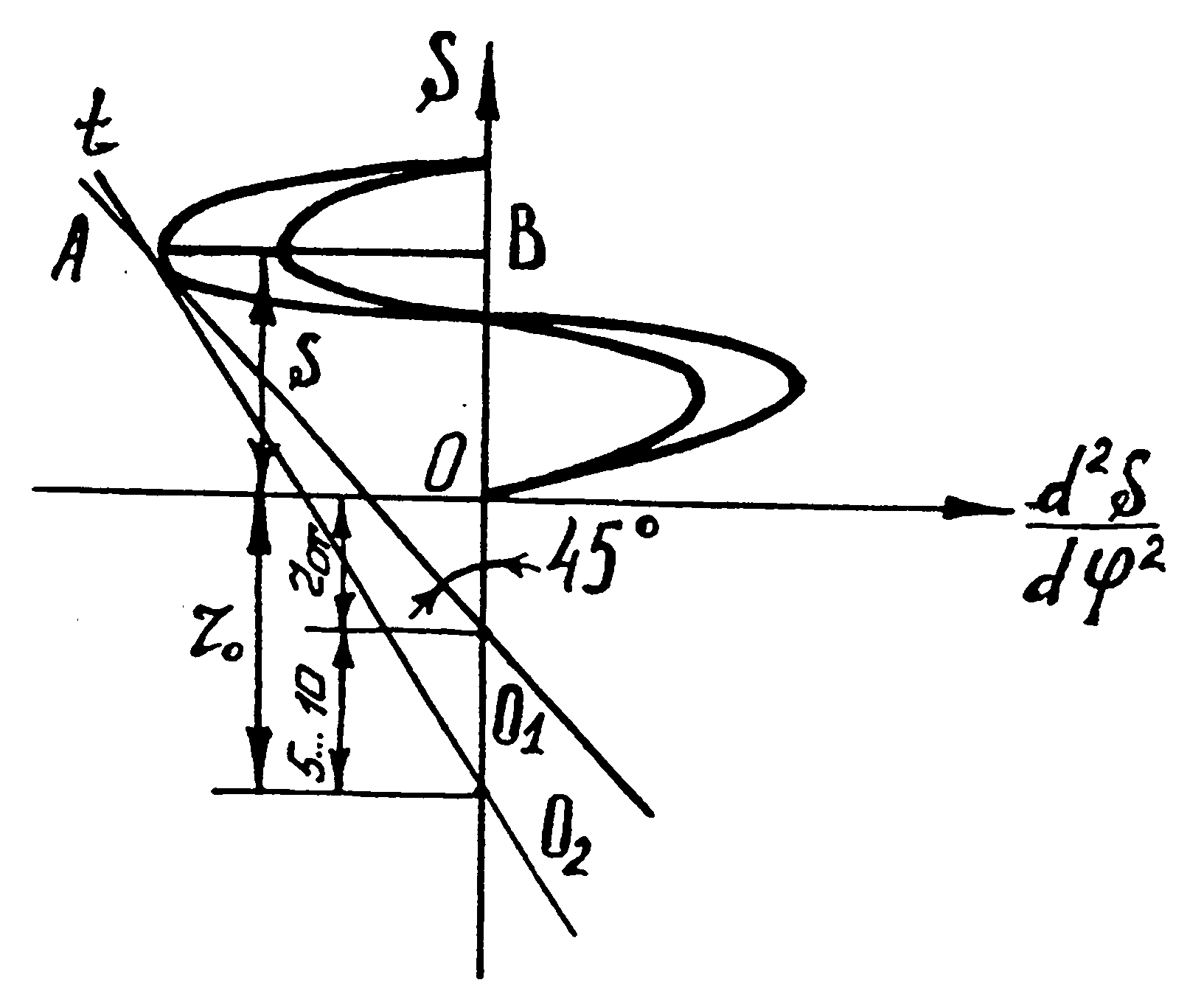
![]() По
осі ординат відкладемо значення S
, а по осі абсцис – відповідне йому
значення /рис. 9.7/. Сполучивши послідовно
плавною кривою отримані точки, одержимо
діаграму
По
осі ординат відкладемо значення S
, а по осі абсцис – відповідне йому
значення /рис. 9.7/. Сполучивши послідовно
плавною кривою отримані точки, одержимо
діаграму
До визначення початкового радіуса
Рис.9.7
З![]() атим
в зоні від’ємних значень діаграми, які
відповідають найбільшим за абсолютною
величиною значенням , проведемо під
кутом 45º по осі OS дотичну t-t
до цієї
діаграми.
атим
в зоні від’ємних значень діаграми, які
відповідають найбільшим за абсолютною
величиною значенням , проведемо під
кутом 45º по осі OS дотичну t-t
до цієї
діаграми.
Згідно нерівності /9.24/ центр обертання кулачка повинен бути розміщений нижче точки ОІ , на практиці приймаютьОІО2 = /5…10/мм.
 Із
трикутника ОІАВ
/рис.9.7/ маємо
Із
трикутника ОІАВ
/рис.9.7/ маємо
/9.25/
ОІВ = ОВ + ООІ і ОВ = S; ООІ= r0 - теоретичний початковий радіус профіля кулачка.
Найменший /початковий/ дійсний радіус профіля кулачка rод
![]()
Затим відомими методами будуємо профіль кулачка, який буде тільки випуклим.
Лекція 10.
Механізми фрикційних передач
План лекції:
10.1. Загальні відомості.
10.2. Циліндрична фрикційна передача.
10.3. Конічна фрикційна передача.
10.4. Лобова фрикційна передача.
10.1. Загальні відомості.
Рух від машин – двигунів до робочих машин можна передавати різними способами. Найпоширенішим і конструктивно зручним способом цієї передачі руху є зчеплення між собою за допомогою яких – небудь кінематичних елементів двох валів, що обертаються. Ці вали можуть розташовуватися у просторі у будь – якому положенні. Залежно від відстані між валами та їх розташування може бути застосована та чи інша система механічної передачі. Найхарактернішими конструкціями передач обертального руху є: а/ передача безпосереднім зіткненням; б/ передачі гнучким зв’язком.
Механізми, в яких для передачі руху використовуються сили тертя, називаються фрикційними механізмами.