

6.3. Плани швидкостей важільного механізму.
Метод планів широко застосовуєтьея при дослідженні важільних механізмів. Розглянемо побудову планів швидкостей на прикладі конкретного механізму, наприклад строгального верстату /рис.6,3, а/. Побудова планів, проводиться в послідовності утворення механізму, спочатку визначаються швидкості т.А1.2 кривошипа, і далі визначаються швидкості характерних точок груп Ассура в послідовності їх приєднання до основного механізму. При цьому кутова швидкість кривошипа вважається сталою.
Для вирішення цієї задачі будемо вважати відомими розміри всіх ланок механізму і закон руху ведучої ланки.
Викреслимо кінематичну схему механізму /рис;6.3, а/ в масштабі μl
μl
=
![]() . /6.17/
. /6.17/
Побудуємо план швидкостей /рис.6.3, б/. Визначимо швидкість, т.А1.2 за величиною, що належить одночасно кривошипу І і повзуну 2
VA1.2 = ω1 * lOA . /6.18/
Вибираємо масштаб плану швидкостей
μV
=
![]() ,
/6.19/
,
/6.19/
де
pVa1.2
-
відрізок
на плані швидкостей в мм, шо зображає
повну швидкість VA1.2
в м/с.
Вектор швидкості VA1.2
направлений
в сторону кутової швидкості ω1,
перпендикулярно до ланки ОА.
Вибираємо довільну т. pV
-
полюс
плану швидкостей і з неї відкладемо в
масштабі вектор швидкості
![]() ,
отримаємо
т. а1.2.
,
отримаємо
т. а1.2.
Визначимо швидкість т.А3 , що належить кулісi О1В і в даний момент співпадає з т.А1.2. Розглянемо рух т.А3 відносно т.А1.2 і відносно т.О1. Складемо векторні рівняння:
 /6.20/
/6.20/
Із
т.а1.2
проведемо пряму в напрямі вектору
швидкості
![]() ,
тобто
паралельно ланці ВО,
а із т.pV
- пряму в напрямі вектору швидкості
,
тобто
паралельно ланці ВО,
а із т.pV
- пряму в напрямі вектору швидкості
![]() ,
тобто
перпендикулярно ланці ВО1.
Місце перетину цих прямих дає т.а3.
З'єднавши т. а3
з
полюсом pV
отркмаємо
вектор
,
тобто
перпендикулярно ланці ВО1.
Місце перетину цих прямих дає т.а3.
З'єднавши т. а3
з
полюсом pV
отркмаємо
вектор
![]() повного
прискорення т.А3.
Визначимо відрізок pVв,
що зображає швидкість т.В,
використавши відношення
повного
прискорення т.А3.
Визначимо відрізок pVв,
що зображає швидкість т.В,
використавши відношення
pVв
=
pVа3
![]() /6.21/
/6.21/
Точка в лежить на продовженні відрізка pVа3 .
Визначимо швидкість т.С. Розглянемо рух т.С відносно т.В і відносно напрямних х - х. Складемо векторні різняння:
![]() /6.22/
/6.22/
Із
т.О
проведемо
пряму в напрямі вектору швидкості
![]() ,
тобто перпендикулярно ланці ВС,
а із pV
-
пряму, паралельно напрямним х
–
х.
Місце
перетину цих прямих дає т.С.
Вектор pVС
показує
повну
швидкість т.С.
Визначимо повну швидкість т. S4,
для цього знайдемо відрізок вS4.
,
тобто перпендикулярно ланці ВС,
а із pV
-
пряму, паралельно напрямним х
–
х.
Місце
перетину цих прямих дає т.С.
Вектор pVС
показує
повну
швидкість т.С.
Визначимо повну швидкість т. S4,
для цього знайдемо відрізок вS4.
вS4
=
вс
![]() . /6.23/
. /6.23/
З'єднавши т.S4 з полюсом pV , отримаємо вектор швидкості т. S4.
Визначимо дійсні швидкості всіх точок
![]() = pVа3*
μV;
= pVа3*
μV;![]() = а3а1.2*
μV;
= а3а1.2*
μV;
![]() = pVс*
μV
.
/6.24/
= pVс*
μV
.
/6.24/
Визначимо кутові швидкості всіх ланок за величиною:
ω3
=
;
ω4
=
![]() .
/6.25/
.
/6.25/
Д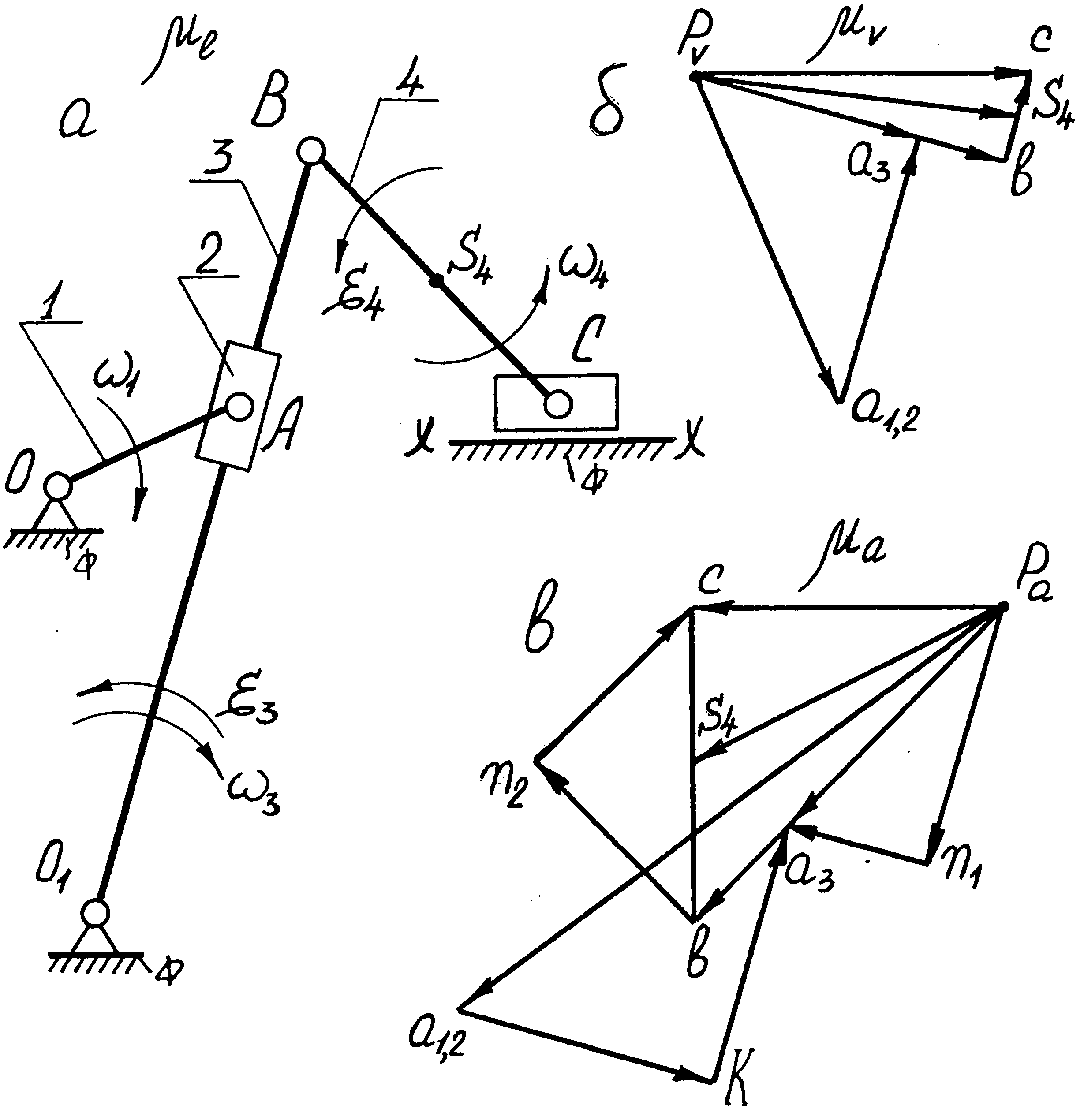 ля
визначення напряму кутових швидкостей
ω3
і
ω4
перєнесемо
вектори лінійних швидкостей
ля
визначення напряму кутових швидкостей
ω3
і
ω4
перєнесемо
вектори лінійних швидкостей
![]() і
в
т.В.
Кутові швидкості будуть направлені в
бік відповідних векторів лінійних
швидкостей, тобто кутова швидкість ω3
направлена
за годинниковою стрілкою, а кутова
швидкість ω4
- проти
годинникової
стрілки.
і
в
т.В.
Кутові швидкості будуть направлені в
бік відповідних векторів лінійних
швидкостей, тобто кутова швидкість ω3
направлена
за годинниковою стрілкою, а кутова
швидкість ω4
- проти
годинникової
стрілки.
Механізм строгального верстату
а - кінематична схема; б - план швидкостей; в - план прискорень.
Рис.6.3.