

14.4. Виміру, виконувані супутниковими приймачами
Відзначимо, що основне призначення GPS - військове. З метою виключення несанкціонованого використання системи в ефемериди супутників навмисне вносяться перекручування, а також спотворюються показання годин супутників і несуча частота (так званий - режим Selective Availabilig (SA). Виключити ці перекручування може лише приймач, що має доступ до Р-коду (тільки військовий приймач). У цьому випадку гранична помилка визначення абсолютних координат становить 10 - 20 м. Звичайний приймач, що працює лише по C/А коду, може визначити абсолютні координати із граничною помилкою 150 - 200 м. У системі ГЛОНАСС перекручування не вносяться й будь-який користувач може визначити координати свого місця розташування із граничною помилкою 20 м.
Приведемо деякі можливі класифікації сучасних приймачів.
Приймачі, здатні приймати:
1) C/А код;
2) C/А код+фазові виміри на частоті L1;
3) C/А код + фазові виміри на частотах L1 й L2;
4) C/А код+P-код+фазові виміри на частотах L1 й L2.
У геодезії широке застосування знайшли приймачі, що займають 2 й 3-ю позиції у вищенаведеній класифікації. Крім цього, приймачі можна класифікувати по області застосування: 1) геодезичні приймачі; 2) навігаційні приймачі; 3) приймачі часу; 4) військові приймачі.
У геодезичних роботах в основному використовуються приймачі, здатні робити фазові виміри на частоті L1 або двох частотах L1 й L2. Однак для визначення виправлень у годинники приймача й забезпечення синхронної роботи декількох одночасно працюючих приймачів паралельно з фазовими вимірами виробляються кодові виміри з використанням C/А коду. По кодових вимірах мікропроцесор приймача автоматично обчислює виправлення й коректує годинники приймача з точністю 1 ms=0,001 с. Отже, несинхронність роботи приймачів, що роблять виміри на різних пунктах, не перевищує 2 ms.
Основні блоки GPS приймача представлені на рис. 14.12.
1 - антена із передпосилювачем; 2 - ідентифікатор сигналів і розподіл частот по каналах; 3 - мікропроцесор для керування роботою приймача; 4 - розшифровка прийнятої інформації, обчислення абсолютних координат і виправлень у години прийому, виконання фазових вимірів;
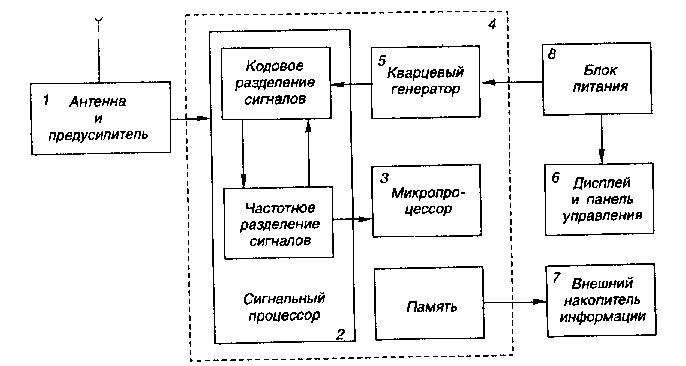
Рис. 14.12. Структурна схема приймача
5 - стабільний кварцовий генератор; 6 - дисплей і панель керування; 7 - блок пам'яті для запису й зберігання інформації; 8 - блок живлення.
Для того, щоб робити фазові виміри на несучій частоті, необхідно зробити демодуляцію сигналу (очистити сигнал від модуляції). Одним зі способів демодуляції сигналу є квадратування, тобто множення сигналу самого на себе.
Якщо модульований сигнал представити у вигляді:
![]()
де Р(t)
— амплітуда сигналу, що у певні моменти
часу приймає значення +1 або — 1, те після
зведення у квадрат цього сигналу
амплітуда сигналу змінюватися не буде,
але частота подвоїться![]() (див.рис.
14.11).
(див.рис.
14.11).
В іншому способі демодуляції сигнал розділяють на два, в одному із сигналів змінюють фазу на /2 і знову сигнали складають. У результаті одержують гармонійний синусоїдальний сигнал.
У цей час найбільше поширення одержали приймачі одночастотні (L1) дванадцяти канальні й двочастотні (L1 і L2) по дванадцять каналів на кожну частоту. Такими приймачами можна одночасно приймати сигнали від дванадцяти супутників.
Частота сигналу, прийнята приймачем, занадто висока, щоб на ній можна було робити високоточні виміри, тому неї знижують шляхом вирахування із прийнятої частоти генератора приймача (ця операція називається гетеродинуванням). Гетеродинування роблять у кілька етапів, але сумарна частота, що віднімають із прийнятого сигналу, близька до частоти, випромінюваної супутником. На виділеній різницевій частоті роблять фазові виміри.
Приймач приймає сигнали від декількох супутників (як правило, не менш чотирьох) і фазові виміри виробляються по всіх каналах одноразово. На рис. 14.13 ілюструється принцип фазових вимірів у двох каналах (в інших каналах - аналогічно). На першій і другий тимчасових осях (1 й 2) показані прийняті сигнали від двох різних супутників (після зняття з них модуляції). На третій тимчасовій осі показана частота гетеродина (сумарна частота гетеродинирування) загальна для всіх супутникових сигналів. На четвертій і п'ятій часових осях представлений результат гетеродинування (різницева частота):
![]()
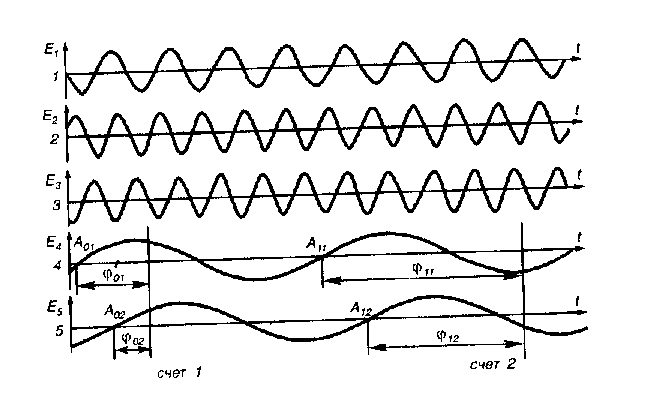
Рис. 14. 13. Принцип фазових вимірів у двох каналах
У тому випадку, якщо частота прийнятого сигналу менше частоти гетеродина - результат фазових вимірів має знак «плюс»; якщо прийнята частота більше частоти гетеродина - знак «мінус».
Початок фазових вимірів визначається точкою переходу різницевого сигналу через нуль (команда «старт»). Якщо протягом цілого періоду не надійшла команда «рахунок», результат виміру обнуляєтся й рахунок починається знову. Таким чином, при надходженні першої команди «рахунок» записується результат виміру від стартових точок А01 й А02 (див.рис. 14.13) до команди «рахунок 1»: φ01 і φ02. При цьому перший результат виміру за абсолютним значенням завжди менше одиниці й становить частку фазового циклу. При надходженні наступних команд «рахунок» виміряється й заноситься на замітку кількість фазових циклів і частки циклу від початкових точок А01, А02, до надходження чергової команди «рахунок». Команди «рахунок» надходять в усі канали одночасно. Вплив помилок, властивих супутниковим методам виміру, істотно зменшується, якщо одночасно використається кілька приймачів, установлених на обумовлених пунктах, синхронно приймаючі сигнали від тих самих супутників. У такому випадку в різностях координат будь-якої пари приймачів всі наведені джерела помилок будуть істотно зменшені. Різниці координат по С\А кодовим вимірам, що вироблялися синхронно декількома приймачами по тим самим супутниках, мають середню квадратичну помилку 0,3 - Зм. Різниця координат, обчислених за результатами фазових вимірів, характеризується середньої квадратичною помилкою 0,5 см+D10-6, де D - відстань між приймачами. Основні джерела помилок, що супроводжують супутникові виміри, наведені в табл. 14.1.
Таблиця 14.1
|
Джерело похибок |
С/А код – режим зашумлення сигналу ввімкнутий* |
Пояснення |
|
І Ефемериди супутника Показники годинників супутника ІІ Вплив іоносфери: а) модель іоносфери для одночастотно-го прийому; б) двохчастотний приймач Вплив тропосфери Вплив відбитих сигналів ІІІ Шум при вимірах Затримка сигналу в апаратурі Зміщення фазового центру антени |
20 – 50м 10 – 50м
2 – 100 дециметри дециметри 5м
1 – 10м метри Міліметри – сантиметри |
Джерела похибок на супутнику
Джерела похибок на шляху розподілу сигналу
Джерела похибок приймача |
*Включений з листопада 1991 р.
У табл. 14.1 наведені джерела помилок, властиві GPS при включеному режимі зашумленя сигналу (5.4), тому що цей режим є стандартним з листопада 1991 р.; помилки виміру з використанням Р-коду не приводяться, тому що він був недоступний геодезистам.
При кодових вимірах приймач приймає спеціальний сигнал, який називають кодом, що складається з деякої кількості одиничних сигналів, чергування яких для непосвяченої людини сприймається як випадковий процес. Такі сигнали називають псевдовипадковими кодами. Кожен супутник NAVSTAR GPS випромінює свій код, супутники ГЛОНАСС використовують єдиний код на всі супутники. У пам'яті приймача зберігаються всі коди, по яких виробляється розпізнавання номера супутника (для NAVSTAR GPS), російські супутники розпізнаються по частоті випромінювання. У приймачі також формуються точно такі ж коди, що й на супутниках і, порівнюючи кодові сигнали, прийняті із супутників, з аналогічними сигналами, створеними в приймачі, вирішують два завдання:
1) псевдовипадкова послідовність дозволяє приймати сигнали малої потужності за допомогою компактних антен;
2) надійно реєструвати час прийому кодового сигналу по годинниках приймача.
У зв'язку з тим, що годинники приймача не настільки стабільний як годинник на супутниках (годинники приймача приблизно в мільйон разів менш стабільні, чим годинники на супутнику), одночасно з координатами приймача (ХП, УП, ZП) визначається й виправлення в годинники приймача t, усього чотири невідомих.
Інтервал часу між випромінюванням сигналу на супутнику ТC і прийомом його в приймачі ТП, помноженому на швидкість поширення електромагнітних хвиль v, називають псевдодальністью, тому що вона містить значну помилку годинника приймача:
![]()
Відстань між супутником і приймачем на момент виміру пов'язане з результатами вимірів наступним співвідношенням:
![]()
або![]()
Таких вимірів повинне бути мінімум 4, які вирішуються як просторова лінійна при далекомірних вимірах.
При фазових вимірах псевдовипадкові коди не використовуються, а виміру виконують на несучій частоті, що звільняють від модуляції. У зв'язку з тим, що довжина хвилі несучої частоти величина невелика - 19 см, а точність виміру різниці фаз становить ≈1%, те потенційна точність фазових вимірів становить 2 мм, а при тривалих вимірах за рахунок осереднення ця точність у деяких випадках може бути ще збільшена.
У зв'язку з тим, що частота на супутнику не збігається із частотою приймача, початкові фази цих частот також не збігаються, то технічна реалізація таких вимірів досить складна, але суть її зводиться до того, що з декількох супутників (звичайно не менш 4) приймають сигнали й підраховують кількість фазових циклів прийнятих сигналів за єдиний інтервал часу.
Складання результатів вимірів фазових циклів є основою для обчислення збільшень координат пунктів, на яких були виконані синхронні виміри.