

1.5. Модуляция
Во многих случаях на практике изучаемый объект находится на значительном удалении от потребителя измерительной информации. При этом возникает задача передачи этой информации от объекта измерения до потребителя. Передача измерительной информации осуществляется с помощью различного вида сигналов с использованием таких процедур, как модуляция, дискретизация (квантование) и кодирование.
Модуляция позволяет осуществить для сигнала обмен между полосой частот и отношением сигнала к шуму, увеличивает объем передаваемой информации по одной линии связи за счет частотного разделения каналов и повышает достоверность передаваемых сигналов при использовании помехоустойчивых видов модуляции.
Модуляция
– это образование сигнала путем изменения
параметров переносчика информации под
воздействием сообщения. В качестве
переносчиков информации в измерительной
технике используются гармонические
колебания или периодические
последовательности импульсов. В несущем
гармоническом сигнале
 могут
модулироваться три параметра: амплитуда
могут
модулироваться три параметра: амплитуда
 ,
частота
,
частота
 ,
фаза
,
фаза
 .
В зависимости от изменяемого параметра
переносчика различают амплитудную,
частотную и фазовую модуляции
синусоидального сигнала.
.
В зависимости от изменяемого параметра
переносчика различают амплитудную,
частотную и фазовую модуляции
синусоидального сигнала.
1.5.1. Амплитудная модуляция
Амплитудная модуляция – это образование сигнала путем изменения амплитуды гармонического колебания (переносчика) пропорционально мгновенным значениям напряжения или тока другого электрического сигнала (сообщения). Модулирующий сигнал может быть либо детерминированным, либо случайным, но всегда наивысшая частота его спектра max должна быть меньше частоты несущего сигнала 0.
Пусть модулирующий сигнал, несущий информацию имеет вид
 (1.5.1)
(1.5.1)
где Е – амплитуда модулирующего сигнала; – угловая частота модулирующего сигнала, а несущий сигнал имеет вид
 (1.5.2)
(1.5.2)
В модулированном сигнале амплитуда несущей частоты будет изменяться по линейному закону

где
 –
коэффициент пропорциональности.
–
коэффициент пропорциональности.
Тогда
выражение для модулированного сигнала
 запишется в виде
запишется в виде
 (1.5.3)
(1.5.3)
где
U = KE
– максимальное изменение значения
амплитуды переносчика;
 – относительное изменение амплитуды
несущей частоты, называемое глубиной
модуляции.
– относительное изменение амплитуды
несущей частоты, называемое глубиной
модуляции.
Если
m
1,
т.е. при
 амплитуда
амплитуда
 всегда будет иметь положительные
значения и огибающая модулированного
сигнала будет повторять форму модулирующего
сигнала без искажения (рис. 1.5.1).
всегда будет иметь положительные
значения и огибающая модулированного
сигнала будет повторять форму модулирующего
сигнала без искажения (рис. 1.5.1).
Если
m > 1,
т.е. при
 амплитуда
в некоторых интервалах времени будет
иметь отрицательное значение, что
приведет к искажению огибающей
модулированного сигнала (рис. 1.5.2).
амплитуда
в некоторых интервалах времени будет
иметь отрицательное значение, что
приведет к искажению огибающей
модулированного сигнала (рис. 1.5.2).
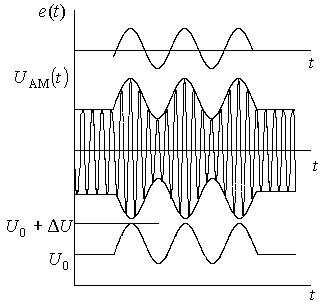
Рис. 1.5.1. Амплитудная модуляция (m 1)
Рассмотрим
использование амплитудной модуляции
на примере использования в качестве
переносчика и модулирующего сигнала
гармонических сигналов: переносчик
 и модулирующий сигнал
и модулирующий сигнал
 .
Приняв для простоты
.
Приняв для простоты
 и используя выражение для модулированного
сигнала, получим
и используя выражение для модулированного
сигнала, получим
 (1.5.4)
(1.5.4)
Из
полученного выражения видно, что здесь
амплитудно-модулированный сигнал
состоит из основного колебания несущей
частоты
 и двух колебаний, отличающихся от
переносчика на частоту сообщения .
Основное сообщение сохраняет частоту
и амплитуду переносчика в процессе
модуляции. Второй член в этом выражении
представляет собой синусоиду с амплитудой
и двух колебаний, отличающихся от
переносчика на частоту сообщения .
Основное сообщение сохраняет частоту
и амплитуду переносчика в процессе
модуляции. Второй член в этом выражении
представляет собой синусоиду с амплитудой
 и повышенной частотой
и повышенной частотой
 и называется верхней боковой составляющей.
Третий член в этом выражении есть также
синусоида с амплитудой
и пониженной частотой
и называется верхней боковой составляющей.
Третий член в этом выражении есть также
синусоида с амплитудой
и пониженной частотой
 ,
которая называется нижней боковой
составляющей. Полоса частот сигнала
при этом будет равна (рис. 1.5.3)
,
которая называется нижней боковой
составляющей. Полоса частот сигнала
при этом будет равна (рис. 1.5.3)
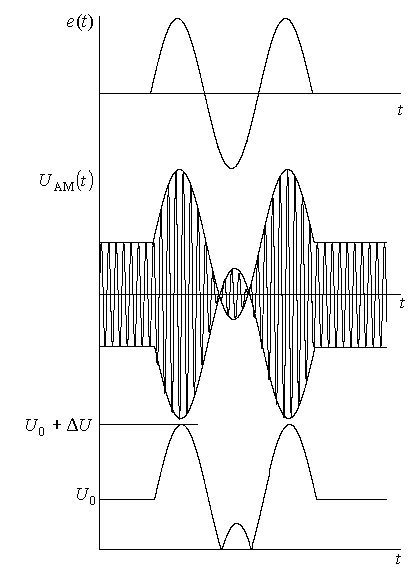
Рис. 1.5.2. Амплитудная модуляция (m > 1)
 (1.5.5)
(1.5.5)
Так, при частоте
переносчика 0
и частоте модулирующего сигнала = 100Гц
полоса частот, занимаемая АМ-сигналом
 ,
составляет 200 Гц, т.е. сигнал лежит в
полосе частот от 4900 до 5100 Гц.
,
составляет 200 Гц, т.е. сигнал лежит в
полосе частот от 4900 до 5100 Гц.
Рассмотрим также использование модуляции для случая сложного непериодического модулирующего сигнала, который можно записать в виде
 (1.5.6)
(1.5.6)
где
 – амплитуда n-й
гармоники;
– амплитуда n-й
гармоники;
 – начальная фаза n-й
гармоники.
– начальная фаза n-й
гармоники.
Рис. 1.5.3. Амплитудные спектральные диаграммы модулирующего
и АМ-сигналов
Используя выражение сигнала для модулированного, получим
 (1.5.7)
(1.5.7)
Таким
образом, спектр сложного АМ-сигнала
состоит из колебаний несущей частоты
и множества колебаний с частотами
 и
и
 .
Здесь
– верхняя боковая полоса;
– нижняя боковая полоса. Полоса частот
сигнала
составляет
.
Здесь
– верхняя боковая полоса;
– нижняя боковая полоса. Полоса частот
сигнала
составляет
 . (1.5.8)
. (1.5.8)
В процессе модуляции происходит смещение или перенос спектра сообщения передаваемого сигнала на интервал частот, равный частоте переносчика (рис. 1.5.4).
Рис. 1.5.4. Спектральные диаграммы сигналов при АМ-модуляции
При работе нескольких
измерительных устройств и в случае
передачи информации от объекта измерения
по одной линии связи необходимо, чтобы
спектры сигналов не перекрывали друг
друга, а, следовательно, чтобы несущие
частоты отличались друг от друга не
менее чем на
 .
.
Например,
если спектр сигнала ограничен частотой
n = 10кГц,
то ширина спектра сигнала составляет
 20кГц.
При организации нескольких каналов
несущие должны отличаться друг от друга
не менее чем на 20 кГц. Тогда число каналов
связи
20кГц.
При организации нескольких каналов
несущие должны отличаться друг от друга
не менее чем на 20 кГц. Тогда число каналов
связи
 , (1.5.9)
, (1.5.9)
где
 – диапазон частот для канала;
– ширина спектра АМ-сигнала.
– диапазон частот для канала;
– ширина спектра АМ-сигнала.
Например,
при
 = 300кГц,
= 300кГц,
 = 200кГц,
а
= 20
кГц число каналов связи будет
= 200кГц,
а
= 20
кГц число каналов связи будет
 .
.
Для уменьшения полосы частот модулированного сигнала, повышения помехоустойчивости и лучшего использования аппаратуры осуществляют передачу одной боковой полосы сигнала. Вся информация о сигнале содержится в боковых полосах без несущего колебания. Вторая боковая полоса и несущая подавляется с помощью фильтров или специальных схем. Для восстановления передаваемого сигнала на приемном пункте необходимо иметь специальные высокостабильные генераторы несущих частот. Передача сигнала без несущих частот позволяет:
– более чем в два раза уменьшить занимаемы диапазон частот;
– уменьшить расход энергии и повысить уровень боковых частот, что приводит к увеличению отношения сигнал-помеха и повышает надежность передачи.