

2.6. Погрешность систем с частотным разделением каналов
Предположим, что при частотном разделении каналов сигнал в каждом канале строго ограничен какой-то полосой частот F. Кроме того, канальный фильтр идеален, т.е. пропускает только эту полосу, а вне полосы F имеет бесконечно большое затухание. В то же время реальные сигналы имеют конечную длительность и, следовательно, бесконечный спектр частот, а фильтр с бесконечно большим затуханием вне полосы F должен состоять из бесконечно большого числа звеньев, т.е. практически неосуществим. Отличие сигналов и фильтров от идеальных и является причиной возникновения погрешностей.
Рассмотрим погрешности систем с частотным разделением каналов.
Погрешность, обусловленная перекрестным влиянием каналов, возникает вследствие нелинейности характеристик модулятора в передатчике и демодулятора несущей в приемнике.
Входной сигнал модулятора является суммой напряжений поднесущих частот и для n каналов
 (2.6.1)
(2.6.1)
Примем,
что характеристики модулятора или
демодулятора нелинейные и зависимость
 имеет следующий вид:
имеет следующий вид:
 (2.6.2)
(2.6.2)
Подставляя в последнее выражение значение Uвх и принимая для простоты Uk= 1, получим
 (2.6.3)
(2.6.3)
Так
как
 ,
видно, что в выходном напряжении, кроме
входных частот
,
видно, что в выходном напряжении, кроме
входных частот
 и их гармоник появляются комбинационные
частоты
и их гармоник появляются комбинационные
частоты
 и ряд других также со своими гармониками,
причем число этих составляющих велико
и растет с увеличением числа поднесущих
(табл. 2.6.1).
и ряд других также со своими гармониками,
причем число этих составляющих велико
и растет с увеличением числа поднесущих
(табл. 2.6.1).
Таблица 2.6.1
Число каналов |
Число комбинационных составляющих вида |
||
|
|
|
|
5 |
20 |
40 |
40 |
10 |
90 |
480 |
480 |
15 |
210 |
420 |
1820 |



Из
таблицы видно, что, например, в
десятиканальной системе число составляющих
вида
равно 90, а число составляющих вида
равно 480. Причем амплитуда комбинационных
частот в несколько раз больше амплитуд
соответствующих гармоник. Например,
при искажении, обусловленном членом
 ,
амплитуда составляющей вида
больше амплитуды третьей гармоники
в шесть раз. Эти комбинационные частоты
проникнут через фильтры поднесущих,
а поскольку таких составляющих много,
сигнал на выходе канала, обусловленный
перекрестными искажениями, будет
иметь характер флюктуационного шума.
,
амплитуда составляющей вида
больше амплитуды третьей гармоники
в шесть раз. Эти комбинационные частоты
проникнут через фильтры поднесущих,
а поскольку таких составляющих много,
сигнал на выходе канала, обусловленный
перекрестными искажениями, будет
иметь характер флюктуационного шума.
В реальных условиях по каналам связи передаются модулированные колебания, имеющие кроме поднесущих дополнительные боковые частоты. Каждая из этих боковых частот также будет искажаться, образуя комбинационные частоты. Поэтому число комбинационных частот резко возрастает. Для устранения этой погрешности поднесущие частоты должны быть разнесены между собой так, чтобы попадания комбинационных частот в полосу пропускания фильтров поднесущих полностью исключались.
С увеличением числа каналов разнести их становится труднее, поэтому частотное разделение каналов применяют тогда, когда число каналов невелико. Например, для радиотелеметрии приводится соотношение п 18.
Погрешность, обусловленная влиянием соседних каналов, возникает, так как любые фильтры, используемые для фильтрации поднесущих частот на приемной стороне, не имеют идеальной П-образной характеристики.
Величина этой погрешности зависит от вида модуляции поднесущих частот. Рассмотрим влияние соседних каналов для двух случаев.
1.
Использование амплитудной модуляции
поднесущих частот. Для простоты примем,
что по соседним каналам передаются
немодулированные колебания
 и
и
 .
Так как
.
Так как
 и
и
 – поднесущие частоты соседних каналов,
то они совпадают с резонансными
частотами канальных фильтров Ф1
и Ф2
(рис. 2.6.1). Так как фильтры не идеальны,
то частота
пройдет на выход фильтра Ф2,
а частота
– на выход фильтра Ф1.
– поднесущие частоты соседних каналов,
то они совпадают с резонансными
частотами канальных фильтров Ф1
и Ф2
(рис. 2.6.1). Так как фильтры не идеальны,
то частота
пройдет на выход фильтра Ф2,
а частота
– на выход фильтра Ф1.
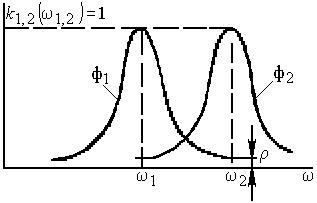
Рис. 2.6.1. Характеристика фильтров соседних каналов
В этом случае выходное напряжение фильтра Ф1 равно сумме двух составляющих
 (2.6.4)
(2.6.4)
где
 – нормированный коэффициент передачи
фильтра на частоте
,
– нормированный коэффициент передачи
фильтра на частоте
,
 (2.6.5)
(2.6.5)
 (2.6.6)
(2.6.6)
Демодулятор
поднесущих и фильтр ФНЧ
(рис. 2.5.2)
выделяют низкочастотную составляющую,
т.е. колебания с частотой
 .
Для того чтобы получить величину
выходного напряжения, разложим выражение
для Um
по биному
Ньютона. Тогда
.
Для того чтобы получить величину
выходного напряжения, разложим выражение
для Um
по биному
Ньютона. Тогда
 (2.6.7)
(2.6.7)
Так как < 1, приближенно можно записать
 (2.6.8)
(2.6.8)
Если нормированный
коэффициент передачи фильтра ФНЧ
на частоте
 равен
равен
 ,
то напряжение на выходе фильтра
,
то напряжение на выходе фильтра
 (2.6.9)
(2.6.9)
Таким
образом, использование фильтров с
неидеальной характеристикой
пропускания вызывает помеху в виде
постоянной составляющей, равной
 ,
и переменной, представляющей собой
биения с частотой
и амплитудой
,
и переменной, представляющей собой
биения с частотой
и амплитудой
 .
.
2. Использование частотной модуляции поднесущих частот. В этом случае напряжение на выходе частотного демодулятора пропорционально отклонению мгновенной частоты сигнала от резонансной частоты фильтра поднесущей. Для определения мгновенного отклонения частоты найдем выражение для напряжения на выходе фильтра. Как и в первом случае, примем, что по соседним каналам передаются немодулированные колебания.
Напряжение на выходе фильтра равно сумме двух составляющих
 (2.6.10)
(2.6.10)
где – коэффициент передачи фильтра Ф1 на частоте , а
(2.6.11)
Так
как
 ,
то
,
то
 .
.
Мгновенную
частоту сигнала определим как
 ,
а ее отклонение от резонансной частоты
фильтра
,
а ее отклонение от резонансной частоты
фильтра
 равно
равно
 (2.6.12)
(2.6.12)
Таким образом,
помеха, обусловленная соседним каналом
при частотной модуляции поднесущих,
представляет собой биения с частотой
и амплитудой
 .
.
Погрешность, обусловленная увеличением амплитуд поднесущих, обусловлена ограниченностью линейного участка модулятора несущей частоты (М на рис. 2.5.2) и возникает следующим образом. В n-канальной измерительной системе на вход модулятора несущей поступает n поднесущих. Положим, что характеристика модулятора имеет линейный участок 2U0 (рис. 2.6.2, а). Будем считать, что амплитуды поднесущих Ui как при AM, так и при ЧМ равны. Тогда для того чтобы модулятор работал на линейном участке характеристики, необходимо выполнение следующих соотношений:
а) при частотной модуляции поднесущих
 (2.6.13)
(2.6.13)
б) при амплитудной модуляции поднесущих
 (2.6.14)
(2.6.14)
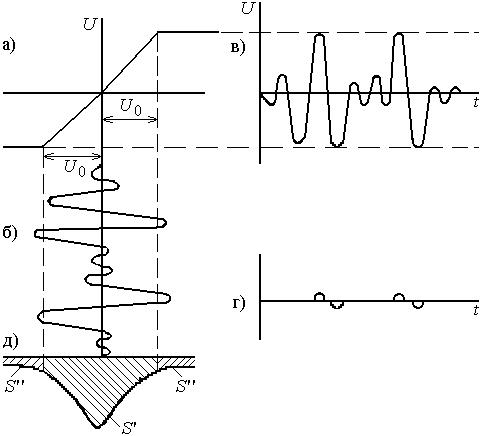
Рис. 2.6.2. Определение погрешности, обусловленной увеличением
амплитуд поднесущих
Необходимость двойки в знаменателе последнего выражения видна из рис. 2.6.3, на котором показана амплитудная модуляция синусоидального напряжения при 100%-й модуляции.
Следовательно,
чтобы выходной сигнал модулятора несущей
частоты не выходил за границы линейного
участка характеристики, необходимо,
чтобы амплитуда поднесущих Ui
была
меньше допустимых
 ,
найденных из выражений (2.6.13) и (2.6.14).
,
найденных из выражений (2.6.13) и (2.6.14).
Такое ограничение
амплитуд поднесущих частот нежелательно,
так как отношение сигнал/помеха при
сравнительно малых значениях Ui
оказывается
недостаточным и для увеличения отношения
 амплитуды
поднесущих выгодно увеличивать.
амплитуды
поднесущих выгодно увеличивать.
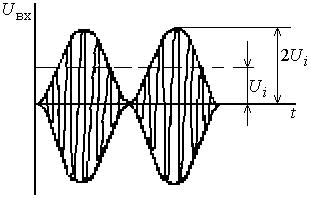
Рис. 2.6.3. Амплитудно-модулированные колебания
Выясним, к чему приведет увеличение поднесущих, т.е. можно ли допустить появление перемодуляции. Если генераторы поднесущих независимы, то напряжение на выходе суммирующего устройства U (рис. 2.6.2, б) является случайным процессом, представляющим собой сумму случайных процессов. Этот случайный процесс при Ui > будет в течение некоторого времени выходить за пределы линейного участка модулятора, как это видно из рис. 2.6.2, в.
Разность
 представляет собой последовательность
импульсов, случайно распределенных во
времени (рис. 2.6.2, г)
и
имеющих случайные амплитуды и длительности.
Такая последовательность импульсов
имеет сплошной спектр и, следовательно,
пройдет на
выходы
всех каналов в виде помехи.
представляет собой последовательность
импульсов, случайно распределенных во
времени (рис. 2.6.2, г)
и
имеющих случайные амплитуды и длительности.
Такая последовательность импульсов
имеет сплошной спектр и, следовательно,
пройдет на
выходы
всех каналов в виде помехи.
Значение погрешности, обусловленной этой помехой, зависит от превышения фактической амплитуды поднесущей над допустимой амплитудой , определенной из выражений (2.6.13) и (2.6.14), т.е. от перемодуляции.
Найти
допустимое превышение Ui
над
можно следующим образом. Если число
поднесущих велико (n
>
10), то в соответствии с центральной
предельной теоремой теории вероятностей
напряжение на выходе суммирующего
устройства
 будет распределено по нормальному
закону (рис. 2.6.2, д),
плотность
распределения которого определим
из выражения
будет распределено по нормальному
закону (рис. 2.6.2, д),
плотность
распределения которого определим
из выражения
 , (2.6.15)
, (2.6.15)
где
 – дисперсия процесса, представляющего
собой напряжение
– дисперсия процесса, представляющего
собой напряжение
 на выходе суммирующего устройства.
на выходе суммирующего устройства.
Так как дисперсия есть средняя мощность процесса, то для независимых процессов суммарная дисперсия
 (2.6.16)
(2.6.16)
На рис. 2.6.2, д площадь S пропорциональна вероятности того, что напряжение не будет выходить за пределы –U0 и + U0, причем эта вероятность равна интегралу
 . (2.6.17)
. (2.6.17)
Тогда вероятность того, что выходит за пределы участка, ограниченного значениями –U0 и + U0 (рис. 2.6.2, д), пропорциональна площади S ' и S " (определяется как разность)
 (2.6.18)
(2.6.18)
Задаваясь величиной этой разности, определяют допустимые значения амплитуд поднесущих. В частности, если вероятность выхода сигнала за линейный участок (рис. 2.6.2, а) равна 10-3, то, определив значение интеграла вероятностей по таблицам, получим
 (2.6.19)
(2.6.19)
Другой вероятности выхода процесса за линейный участок характеристики будет соответствовать другое соотношение между Ui и U0. Таким образом, из последнего выражения видно, что при заданном значении помехи чем больше число каналов в системе, тем большее увеличение амплитуд поднесущих можно допустить.
Выбор
амплитуд поднесущих Ui
с учетом погрешности, обусловленной
перемодуляцией, называется выбором по
критерию перегрузки, в то время как
выбор Ui
по соотношениям
(2.6.1) и (2.6.2) называется выбором по
отсутствию перегрузки. Обозначив
 ,
получим
,
получим
 .
.
Зависимость отношения Ап от числа каналов в системе показана на рис. 2.6.4.
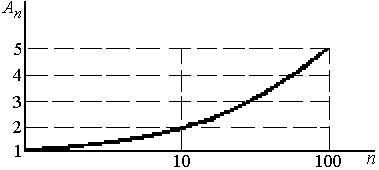
Рис. 2.6.4. Коэффициент увеличения амплитуд поднесущих
Из
рисунка видно, что если допускать
возможность перемодуляции, то в
системах с большим числом каналов
можно значительно увеличивать
амплитуды поднесущих частот. Увеличение
же амплитуд в Ап
раз позволяет
в
 раз улучшить отношение
.
раз улучшить отношение
.