

Перейти к оглавлению на странице: 256
откуда выводим, что
~τ |
= |
~τ |
|
ϕ |
= |
sin(Δϕ/2) |
ϕ |
(3.13) |
||||
|
|
|
|
|
|
|
|
|
m~ |
|||
t |
ϕ |
|
t |
(Δϕ/2) |
t |
|||||||
и, так как при t → 0 истинны предельные соотношения
ϕ → 0, sin(Δϕ/2) → 0, m~ → ~n, |
(3.14) |
то из (3.13) при t → 0 получаем (3.11). Что и требовалось.
Теорема 3.1.
wn = v2/%. |
(3.15) |
Доказательство.
Из формул (3.5), (3.11), (3.10) получаем
wn = v |
dt |
= v dt |
= |
% . |
||||
|
|
d~τ |
|
dϕ |
v2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Что и требовалось.
§4. Определение кривизны траектории точки по движению
Согласно определению, данному в предыдущем пункте, кривизна траектории в точке, имеющей естественную координату s, (см. (3.10)) зависит только от этой координаты и не зависит от выбора параметризации этой траектории. Тем не менее, один из удобных методов нахождения кривизны, кинематический метод, использует параметризацию траектории задание движения точки по траектории как функции времени в декартовых или криволинейных координатах.
Кинематический метод
Пусть движение точки задано тройкой скалярных функций x(t), y(t), z(t). Пусть v = v(t), w = w(t) модули ее скорости и
29

Перейти к оглавлению на странице: 256
ускорения. Используя результаты предыдущего параграфа, выписываем следующую цепочку формул для вычисления K, %:
p
v = (x˙ (t))2 + (y˙(t))2 + (z˙(t))2,
p |
|
|
|
|
|
|
(4.1) |
w = (¨x(t))2 + (¨y(t))2 + (¨z(t))2, |
|
||||||
|
|
p |
|
|
|
|
|
wτ = v,˙ wn = w2 − wτ 2 = v2/%, |
(4.2) |
||||||
K = v−2p |
|
, % = K−1. |
(4.3) |
||||
w2 − wτ 2 |
|||||||
Пусть теперь движение точки задано тройкой криволинейных координат скалярных функций q1(t), q2(t), q3(t), а v = v(t), w = w(t) попрежнему модули ее скорости и ускорения. В предположении, что эта система координат ортогональна, и используя формулы (1.5), (2.2) для проекций скорости и ускорения точки, получаем:
vqm = Hqm q˙m, wqm = Hqm −1Eqm (T ), m = 1, 2, 3, |
(4.4) |
p
v = (vq1 (t))2 + (vq2 (t))2 + (vq3 (t))2,
(4.5)
p
w = (wq1 (t))2 + (wq2 (t))2 + (wq3 (t))2,
теперь по формулам (4.2), (4.3) можно вычислить величины K, %.
§5. Два примера движения точки
Мы рассмотрим примеры, которые позволят сопоставить известные со школы факты с введенными выше понятиями.
Прямолинейное движение
Так называют движение точки, траектория которой лежит на прямой. Начало системы Oxyz поместим на этой прямой, а ось x направим вдоль нее. Тогда получим уравнение траектории:
y = 0, z = 0 |
(5.1) |
и, как следствие, формулы:
v2 = (x˙ (t))2 + (y˙(t))2 + (z˙(t))2 = (x˙ (t))2,
(5.2)
w2 = (¨x(t))2 + (¨y(t))2 + (¨z(t))2 = (¨x(t))2,
30
|
Перейти к оглавлению на странице: 256 |
||||||
|
K = 0, % = K |
p |
|
|
|
|
|
wτ2 |
= (v˙)2 = (¨x)2, wn |
= w2 − wτ2 = 0, |
(5.3) |
||||
|
|
−1 = + |
∞ |
. |
|
(5.4) |
|
|
|
|
|
|
|
||
Прямолинейное движение называют равномерным, |
если |
||||||
v(t) = α, где α постоянная. Так как v(t) = x˙ (t), то x(t) = αt+ β , где β произвольная постоянная. Если x(t0) = x0 , то x(t) = x0 + α(t −t0). Если ввести естественную координату s = |x −x0|, то s = |α(t−t0)|. Прямолинейное движение равнопеременное при w(t) = α, и постоянном α. Из w(t) = x¨(t) следует x(t) = αt2/2 + βt + γ , где β, γ произвольные постоянные. Если x(t0) = x0, x˙ (t0) = x˙ 0 , то
получаем формулу x(t) = x0 + x˙ 0(t − t0) + α(t − t0)2/2. Если ввести естественную координату s = |x−x0|, то s = |x˙ 0(t−t0)+α(t−t0)2/2|.
Движение по окружности
Здесь и далее будут использоваться понятия угла и угла поворота.
Опонятии угла и угла поворота:
(а)Углом поворота между векторами называется вектор
(~a,~b) = |
( |
~0,~a |
· |
~ |
|
~|b,× | |
|||||
|
(arccos(~a,~b)) |
|
~a×~b |
,~a , ~b; |
|
|
|
|
k |
~a b |
|
|
|
|
|
|
|
|
~ |
~ |
|
|
|
|
(~a, b) = − (b,~a). |
|
|||
~
(б) Углом между векторами ~a и b, или углом между прямыми, проходящими через эти векторы (он равен наименьшему из углов
~ |
~ |
между этими прямыми), называем величину | (~a, b)| = arccos(~a, b). |
|
~ |
~ |
(в) Когда говорят об угле между ~a и b, отсчитываемом от ~a к b |
|
~ |
~ |
или наоборот, то имеют в виду угол поворота (~a, b) или (b,~a).
Иногда вместо угла поворота |
~ |
(~a, b) будем говорить об угле, |
|
~ |
|
отсчитываемом от ~a к b. |
|
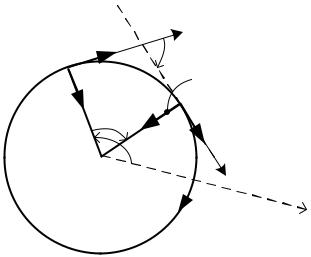
Движением по окружности называют любое движение точки, траектория которого лежит на окружности. Радиус кривизны, а значит и кривизну окружности радиуса R просто найти, опираясь на определение кривизны через угол смежности.
Пусть s приращение естественной координаты за время движения точки от момента t до момента t + t, а ϕ угол смежности за это время.
31
Перейти к оглавлению на странице: 2561
τG(t )
nG(t )
vG(t )
|
∆ϕ |
∆s |
nG(t +∆t ) |
∆ϕ |
τG(t +∆t ) |
ϕ R |
vG(t + ∆t ) |
Рисунок 5.1
Так как s = R ϕ, то устремляя t к нулю (а тогда и
s, ϕ стремятся к нулю), получаем равенства: K = dϕ/ds =
lim (Δϕ/ s) = R−1 , % = R.
s→0
Сдвижением по окружности связывают векторные величины
угловую скорость и угловое ускорение, которые мы сейчас введем. Движение считаем заданным в цилиндрической системе координат (r, ϕ, z) равенствами:
z = 0, r = R, ϕ = ϕ(t). |
(5.5) |
Здесь полюс системы координат помещен в центр окружности, z = 0 уравнение плоскости, в которой лежит окружность, а ϕ полярный угол, отсчитываемый от фиксированного луча, исходящего из полюса и лежащего в этой плоскости. Приращение
полярного угла за время |
t есть угол смежности за это время. Так |
|
как v = ds/dt (см. (3.6)), то разделив равенство |
s = R ϕ на t |
|
и перейдя к пределу при |
t → 0, получаем: |
|
|
v = Rϕ,˙ |
(5.6) |
|
wτ = v˙ = Rϕ,¨ |
(5.7) |
wn = v2/% = Rϕ˙2, |
(5.8) |
|
w~ = Rϕ~¨τ + Rϕ˙2~n. |
(5.9) |
|
32

Перейти к оглавлению на странице: 256
Пусть ~e единичный вектор, параллельный бинормали и исходящий из полюса центра окружности. Введем в рассмотрение следующие величины:
ϕ~e вектор угла поворота,
ω~cp = ϕt ~e средняя угловая скорость, ω~ = ϕ~˙e угловая скорость,
˙ |
|
~ε = ω~ угловое ускорение. |
|
Тогда формулы (5.6)–(5.9) можно переписать в следующем ви- |
|
де: |
|
v = Rω, wτ = Rε, wn = Rω2, |
(5.10) |
w~ = Rε~τ + Rω2~n. |
(5.11) |
Движение по окружности называют равномерным вращением, если ω = ω0 , где ω0 постоянная (не зависит от времени). Так как ω = ϕ˙ , то
ϕ(t) = ω0(t − t0) + ϕ(t0), ε = 0, wτ = 0, wn = Rω02. |
(5.12) |
Движение по окружности называют равнопеременным вращением, если ε = ε0 , где ε0 постоянная.
Так как ε = ω˙ = ϕ¨, то
ϕ(t) = |
ε0 |
(t − t0)2 + ω(t0)(t − t0) + ϕ(t0), wτ = Rε0. |
(5.13) |
2 |
Упражнение 5.1. Движение точки задано в цилиндрических координатах:
z = 0, r = aebt, ϕ = ct, |
(5.14) |
где a, b, c положительные постоянные. Найти уравнение траектории этой точки. Найти скорость и ускорение точки и радиус кривизны траектории как функции аргумента r. Определить зависимость радиуса кривизны от естественной координаты.
33