

Перейти к оглавлению на странице: 256
ГЛАВА 5. СЛОЖНОЕ ДВИЖЕНИЕ
Если рассматривают движение механической системы относительно двух или более декартовых систем координат, то говорят о сложном движении этой системы. Здесь, в §§1 - 4 рассматривается сложное движение точки, а сложное движение твердого тела обсуждается в §5.
§1. Сложное движение точки. Основные понятия
0 ~ ~ ~
Пусть (O,~eξ,~eη,~eζ), (O , i, j, k) неподвижный и подвижный реперы. Эти реперы и связанные с ними подвижное и неподвижное пространства называют также абсолютным и относительным соответственно. Далее мы будем изучать движение некоторой геометрической точки M относительно неподвижного (абсолютного) и подвижного (относительного) реперов.
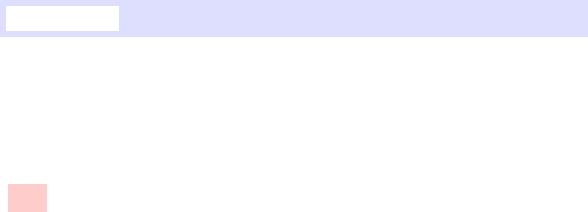
Как пример можно привести движение искусственного спутника Луны, рассматриваемого упрощенно как точка (рис. 1.1). В этом случае часто в качестве абсолютного и относительного рассматривают реперы жестко связанные с Землей и Луной. Мы найдем связь между движением точки M в неподвижном и подвижном пространстве (то есть, относительно подвижного и неподвижного реперов) в предположении, что известно движение подвижного репера относительно неподвижного.
Для этого, прежде всего, введем ряд определений. Движение, скорость и ускорение точки M относительно непо-
движного (абсолютного) репера называют абсолютными, а движение, скорость и ускорение этой точки относительно подвижного (относительного) репера называют относительными.
В момент t точка M совпадает с точкой M0 подвижного пространства (рассматриваемого как твердое тело). Движение, скорость и ускорение этой точки M0 в момент t относительно неподвижного (абсолютного) репера называют переносными для точки M в этот момент.
В связи с этими понятиями будем использовать следующие
−−→
обозначения: ~r = OM , ~v , w~ абсолютные радиус-вектор, скорость
−−−→
и ускорение точки, %~ = O0M , ~vr , w~r относительные радиусвектор, скорость и ускорение точки, ~ve , w~e переносные скорость
77
1
Перейти к оглавлению на странице: 256
|
|
y |
M |
|
|
|
|
|
|
′ |
|
|
|
O |
|
|
z |
|
Луна |
ζ |
|
x |
|
|
|
 Земля
Земля
O |
η |
 ξ
ξ
Рисунок 1.1
и ускорение точки. Кроме того, символом ω~ мы будем обозначать угловую скорость подвижного (относительного) репера относительно неподвижного (абсолютного) репера.
Искомые связи между абсолютными и относительными величинами мы получим в §3, 4, а ближайший §2 является вспомогательным.
§2. Относительная производная
~
Пусть C вектор-функция аргумента t, причем
|
~ |
|
~ |
~ |
~ |
|
(2.1) |
|
C = Cxi + Cyj + Czk, |
|
|||||
тогда получаем: |
|
|
|
|
|
|
|
˙ |
~ |
˙ ~ |
˙ ~ |
˙ |
˙ |
˙ |
|
~ ˙ |
~ |
~ |
~ |
(2.2) |
|||
C = Cxi + Cyj + Czk + Cxi + Cyj + Czk, |
|||||||
˙ |
˙ ˙ |
|
|
|
|
|
|
~ ~ ~ |
зависят от пространства, в котором они |
||||||
Производные i, j, k |
|||||||
рассматриваются. В частности, в подвижном пространстве они равны нулю.
Теорема 2.1. (Формулы Пуассона) Пусть подвижный репер
0 ~ ~ ~
(O , i, j, k), жестко связанный с твердым телом, движется
78

Перейти к оглавлению на странице: 256
относительно неподвижного репера (O,~eξ,~eη,~eζ) с угловой скоростью ω~ . Тогда производные подвижных ортов в неподвижном репере вычисляются по формулам:
˙ |
~ |
˙ |
~ |
˙ |
~ |
|
~ |
~ |
~ |
(2.3) |
|||
i = ω~ × i, |
j = ω~ × j, |
k = ω~ × k. |
||||
|
ξ |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
kr |
|
y |
|
|
|
|
r |
|
|
|
|
|
|
j |
|
|
|
|
O′ |
|
|
Oi |
|
|
|
r |
|
r |
|
|
|
|
rO′ |
|
i |
|
|
|
|
|
|
rrO |
|
x |
|
|
|
|
i |
|
|
|
|
O |
|
|
|
η |
|
|
|
|
|
|
|
|
ζ |
|
|
|
|
|
|
|
|
Рисунок 2.1 |
|
|
||
Доказательство. Мы докажем первую из формул (2.3), остальные доказываются аналогично. Введем обозначения:
−−→ |
˙ |
−−−−−−→ |
˙ |
|
|
||
~rO0 = OO0 |
, ~vO0 = ~rO0 , ~rOi |
= O, O0 |
+ i, ~vOi = ~rOi , |
(2.4) |
|||
|
~ |
|
|
|
|
|
|
Так как ~rOi = ~rO0 + i, то |
|
|
|
|
|
||
|
|
|
~ |
|
|
(2.5) |
|
|
|
~vOi = ~vO0 + di/dt. |
|
|
|||
Сопоставляя это равенство с формулой Эйлера |
|
|
|||||
~vOi = ~vO0 |
+ ω~ × (~rOi − ~rO0 ) = ~vO0 |
~ |
(2.6) |
||||
+ ω~ × i, |
|||||||
получаем первую из формул (2.3). |
|
|
|
|
|
||
Что и требовалось. |
~ |
|
|
|
|
||
|
|
|
|
||||
Производную |
|
|
в |
подвижном |
репере |
||
вектор-функции C |
|||||||
(O0,~i,~j,~k) обозначим |
d0C/dt~ , ее называют относительной про- |
||||||
|
|
~ |
|
|
|
~ |
|
изводной вектор-функции C . Производную вектор-функции C в
79

Перейти к оглавлению на странице: 256
~
неподвижном репере (O,~eξ,~eη,~eζ) обозначим dC/dt, ее называют
~
абсолютной производной вектор-функции C .
Теорема 2.2. (Формула относительной производной) Пусть
выполнены условия теоремы 2.1. Тогда относительная и абсолютная производные вектор-функции связаны равенством:
~ |
0 ~ |
~ |
(2.7) |
dC/dt = d C/dt + ω~ × C. |
|||
Доказательство. Формулу (2.2) перепишем в новых обозначени-
ях: |
~ |
0 ~ |
|
~ |
|
~ |
~ |
(2.8) |
|
|
|
||||||
|
dC/dt = d C/dt + Cxdi/dt + Cydj/dt + Czdk/dt. |
|||||||
Учитывая формулы Пуассона (2.3), получаем: |
|
|
||||||
~ |
0 |
~ |
~ |
~ |
~ |
0 ~ |
~ |
(2.9) |
dC/dt = d C/dt + ω~ |
× (Cxi + Cyj + Czk) = d C/dt + ω~ × C. |
|||||||
Что и требовалось.
§3. Теорема сложения скоростей в сложном движении точки
−−→
−−−→Здесь мы воспользуемся обозначениями ~r = OM , ~v , w~, %~ =
O0M , ~vr , w~r , ~ve , w~e , ω~ , введенными в §1.
Теорема 3.1. (Формула сложения скоростей) Абсолютная, переносная и относительная скорости движения точки связаны следующим равенством:
~v = ~ve + ~vr. |
(3.1) |
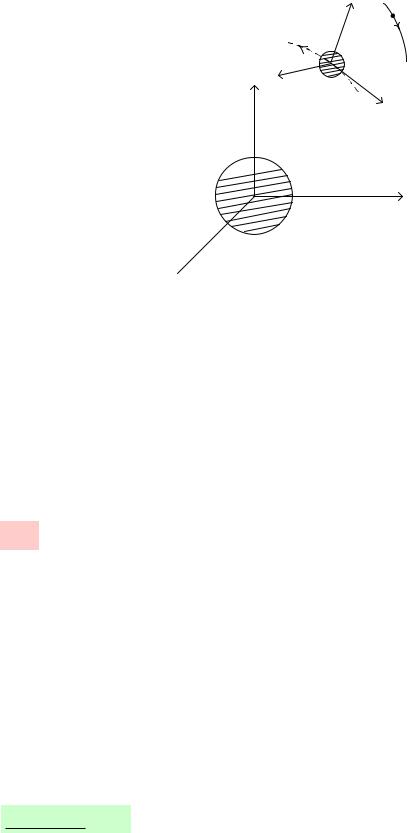
Доказательство. Так как ~r = ~rO0 + %~ (рис. 3.1) то, применяя
теорему 2.2, получаем:
~v = d~r/dt = ~vO0 + ω~ × %~ + d0%/dt~. |
(3.2) |
По формуле Эйлера сумма первых двух слагаемых справа в |
|
равенстве (3.2) равна ~ve (то есть скорости той точки M0 |
подвиж- |
ного пространства, с которой в данный момент t совпадает движущаяся точка M ). Теперь из того, что d0%/dt~ = ~vr следует равенство (3.1).
Что и требовалось.
80