


Перейти к оглавлению на странице: 256
ний твердого тела, соответствующих преобразованиям вида (2.11), является абелевой подгруппой группы D3 .
D43 называют подгруппой вращений вокруг неподвижной точки C .
§3. Поступательное движение твердого тела
Закрепленные и свободные векторы
Напомним понятие закрепленного вектора (см. §1 главы 1). Если A точка аффинного пространства En , а ~a вектор связанного с ним векторного пространства Rn , то пару (A,~a) называют вектором ~a, закрепленным в точке A (или приложенным к точке A). Каждому закрепленному вектору (A,~a) соответствует
упорядоченная пара точек (A, A+~a), и каждой упорядоченной паре
−−→
точек (A, B) соответствует закрепленный вектор (A, AB). Поэтому закрепленным вектором называют также упорядоченную пару
точек аффинного пространства. Вместо того, чтобы говорить о за-
−−→
крепленном векторе (A, AB), будем также говорить о закреплен-
−−→ −−→
ном векторе AB или (A, B). Заметим однако, что обозначение AB
−−→
для закрепленного вектора (A, AB) может привести к недоразуме-
−−→
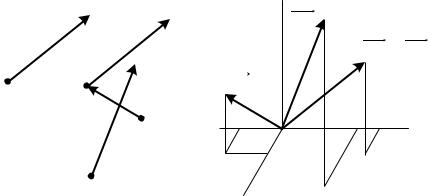
нию см., например, равенство (3.1). Закрепленный вектор AB обычно изображают на рисунке стрелкой от A к B и называют направленным отрезком. В противоположность названию закрепленный вектор, для векторов из Rn используют название свободный вектор. Отличие закрепленных векторов от свободных иллюстрирует рис. 3.1.
Поступательное движение твердого тела
Движение твердого тела называют поступательным, если
−−−−−−−→ −−−−−−−→
( t1, t2 J) A(t1)B(t1) = A(t2)B(t2) (3.1)
для любой пары произвольно выбранных несовпадающих точек A, B этого тела (пространства, связанного с телом). Иначе говоря, движение твердого тела называют поступательным, если направленный отрезок, соединяющий любые две несовпадающие точки этого тела, перемещается параллельно самому себе во все время
47
Перейти к оглавлению на странице: 256
|
G |
C |
DE |
|
|
|
|
||
|
|
E |
BC = FG |
|
|
B |
AB |
|
|
F |
|
|
||
E3 |
|
A |
|
|
|
D |
|
R |
3 |
|
|
|
|
|
Рисунок 3.1
движения. Это второе определение поступательного движения твердого тела, первое мы дали в §2. Докажем их эквивалентность.
а) |
Пусть движение тела является поступательным в смыс- |
||
ле |
первого |
определения. Пусть, как и в §2, (O,~e1,~e2,~e3), |
|
|
~ |
~ |
~ |
(M0(t), i1(t), i2 |
(t), i3(t)) неподвижный и подвижный репер. Если |
||
yjA, yjB, j = 1, 2, 3 координаты точек A и B в подвижном репере, то
|
3 |
|
|
|
3 |
|
|
X |
|
|
|
Xj |
|
A(t) = M0(t) + |
A~ |
|
|
B~ |
||
yj |
ij(t), B(t) = M0 |
(t) + yj |
ij(t), |
|||
|
j=1 |
|
|
|
=1 |
|
или, иначе: |
|
|
|
|
|
|
|
3 |
yA~i (t), M−−−−−−−(t)B(→t) = |
3 |
|
||
M−−−−−−−(t)A(→t) = |
yB~i (t), |
|||||
0 |
Xj |
j j |
0 |
|
X |
j |
|
|
j |
||||
|
=1 |
|
|
|
j=1 |
|
(3.2)
(3.3)
AB = MB |
MA |
|
Так как −−→ −−→ |
− −−→ для любых точек аффинного про- |
|
странства, то, используя равенства (3.3), получаем: |
|
|
A−−−−−−(t)B(→t) = Xj=1(yjB − yjA)~ij(t). |
(3.4) |
|
|
3 |
|
Согласно первому определению поступательного движения, |
||
~ |
|
−−−−−−→ |
векторы ij(t) не зависят от t J , поэтому и вектор A(t)B(t) не |
||
зависит от t J . В силу произвольности выбора точек A и B , это
48

Перейти к оглавлению на странице: 256
означает, что движение твердого тела является поступательным и в смысле второго определения.
б) Если движение тела является поступательным в смысле второ-
~
го определения, то, в частности, каждый из трех векторов ij(t) =
−−−−−−−−→
M0(t)Mj(t), j = 1, 2, 3 является постоянным при t J , то есть движение поступательно и в смысле первого определения.
Теорема 3.1. Поступательное движение твердого тела обладает следующими свойствами:
α) положение тела определяется положением любой его точки;
β) перемещения всех точек тела за время от t0 до t1 равны между собой; γ) скорости всех точек тела равны между собой;
δ) ускорения всех точек тела равны между собой; ε) твердое тело на классе поступательных движений имеет три степени свободы.
Доказательство.
α)Прежде всего отметим, что для того, чтобы идентифицировать точки тела, достаточно задать их координаты в подвижном репере. Положение твердого тела в момент t в неподвижном репере задается семейством {(xτ1 (t), xτ2 (t), xτ3 (t))}τ T . Если задано положение (xA1 (t), xA2 (t), xA3 (t)) одной его точки A, имеющей в подвижном репере координаты (y1A, y2A, y3A), то используя равенства (2.8) для координат точки A, получаем:
aj(t) = xjA(t) − yjA, j = 1, 2, 3. |
(3.5) |
Подставляя выражения aj(t) в формулу (2.8), находим для любой точки тела искомое выражение ее координат xτj (t) через известные ее координаты yjτ в подвижном репере и известные координаты xAj (t) и yjA точки A:
xjτ (t) = xjA(t) − yjA + yjτ , j = 1, 2, 3, τ T. |
(3.6) |
β, γ, δ) Согласно определению, движение, скорость и ускорение точки Mτ , имеющей координаты xτ1 (t), xτ2 (t), xτ3 (t) в репере
(O,~e1,~e2,~e3), это вектор-функции ~r τ (t) = (xτ1 (t), xτ2 (t), xτ3 (t)),
49

|
|
|
|
|
|
|
Перейти к оглавлению на странице: 256 |
~v |
τ |
˙ |
τ |
(t), w~ |
τ |
¨ τ |
(t) соответственно. Поэтому из равенств |
|
(t) = ~r |
|
|
(t) = ~r |
(3.6) получаем (при очевидных обозначениях):
~r τ (t1)−~r τ (t) = ~r A(t1)−~r A(t), ~v τ (t) = ~v A(t), w~ τ (t) = w~ A(t), (3.7)
откуда и следуют свойства β, γ, δ .
Доказанные свойства геометрически очевидны, см. рис. 3.2.
vGτ (t) |
M τ (t) |
rGτ (t)
wGτ ()t
A(t )
M τ (t1 )
vGA (t)
|
) |
( |
|
G |
t 1 |
τ |
|
r |
|
eG3
O
eG1
G
) (A t r
GA |
()t |
A(t1 ) |
w |
|
G |
(t ) |
r |
A |
1 |
eG2
Рисунок 3.2
§4. Вращение твердого тела вокруг неподвижной оси
В §2 вращением вокруг неподвижной оси мы назвали такое движение твердого тела, для которого в пространстве, связанном с этим телом, существует прямая (ось вращения), все точки которой имеют неизменные координаты в неподвижном репере. Пусть O, O1 две различные точки оси вращения. В качестве
50
Перейти к оглавлению на странице: 256
ортонормированного репера, жестко связанного с телом, возьмем |
||||
(O, i1 |
(t), i2 |
(t), i3(t)), где |
i1(t) |
−−→1 |−−→1|. Его можно предста- |
~ |
~ |
~ |
~ |
= OO / OO |
|
|
|
|
|
вить себе как тройку приложенных к точке O единичных взаимно ортогональных и жестко связанных с телом векторов, первый из
|
|
OO |
. За неподвижный репер возьмем |
|
которых направлен вдоль −−→1 |
||||
~ |
~ |
~ |
|
J , а J промежу- |
(O,~e1,~e2,~e3) = (O, i1 |
(t0), i2 |
(t0), i3(t0)), где t0 |
||
ток времени, на котором рассматривается движение.
Как мы установили в §2, в этом случае вращению твердого тела вокруг оси соответствуют преобразования координат по формулам (2.9). Если точка M тела имеет координаты y1, y2, y3 и x1(t), x2(t), x3(t) в подвижном и неподвижном реперах соответственно, то из этих формул можно получить равенство x22(t) + x23(t) = y22 +y32 . Это означает, что траектория любой точки твердого тела при его вращении вокруг неподвижной оси есть окружность с центром на оси вращения, что геометрически очевидно (рис. 4.1).
O1 |
y1, |
x1 |
|
|
|
|
ωr |
M |
|
|
|
A |
ρr |
|
r |
rr |
|
h |
|
|
|
|
y3 |
ϕ |
O |
x3 |
|
|
|
x2 |
|
|
y2 |
|
|
Рисунок 4.1 |
||
В §5 главы 3 мы рассмотрели движение точки по окружности. Эти результаты можно использовать и здесь для нахождения
51

Перейти к оглавлению на странице: 256
скоростей и ускорений точек твердого тела.
Пусть A точка пересечения оси вращения с плоскостью,
перпендикулярной этой оси вращения и проходящей через точку |
||||||||
M тела. Пусть %~ = −−→, |
~ |
−→, |
|
−−→, |
|
|
− , |
|
|
AM h = OA ~r = OM ϕ = ϕ(t + t) ϕ(t) |
|||||||
~r = ~r(t + |
t) − ~r(t) и введем в рассмотрение векторы: скорости |
|||||||
˙ |
|
|
|
|
|
~ |
|
|
|
|
|
|
ϕ = (Δϕ)i |
1 |
и угловой скорости |
||
~v = ~r точки M , угла поворота −→ |
|
|
||||||
ω~ = ϕ˙i1 = lim |
t→0(−→ . |
|
|
|
|
|
|
|
~ |
ϕ/ |
t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Теорема 4.1. В принятых обозначениях истинны формулы:
ϕ |
~r + ~o(Δt) |
при |
t |
→ |
0, |
(4.1) |
~r = −→ × |
|
|
|
|||
~v = ω~ × ~r |
(формула Эйлера). |
(4.2) |
||||
Доказательство. Вторая из формул следует из первой, которую
мы и докажем. Так как |
s = % |
ϕ, то из формулы |
~r = (Δs)~τ + |
||||||||||||||||
~o(Δs) (Δt → 0) ( см. (3.7) главы 3) следует, что |
~r = (% |
ϕ)~τ + |
|||||||||||||||||
|
|
ϕ |
|
|
%~ + ~o(Δt) (Δt |
|
0) |
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
× |
→ |
. Используя равенства |
~r = h + %~ |
, 1 |
|||||||||||||
~o(Δs) = −→ |
|
|
|
−→ |
× |
|
|
||||||||||||
−→ × |
~ |
~ |
|
получаем: |
|
|
−→ |
× |
− |
~ |
|
|
|
|
|
||||
ϕ |
h = 0 |
|
|
~r = ϕ |
(~r |
|
h) + ~o(Δt) = ϕ |
|
~r + |
||||||||||
~o(Δt), |
|
t → 0. Что и требовалось. |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
M (t +∆t) |
|
∆s |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ρr(t +∆t) ∆ϕρr(t) |
M (t) |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
A
Рисунок 4.2
Заметим, что угловая скорость ω~ не зависит от выбора точки твердого тела, поэтому она называется угловой скоростью твердого
52