

Перейти к оглавлению на странице: 256
ζ |
z |
|
|
|
|
|
|
|
|
M |
|
r |
|
r |
y |
r |
|
ρ |
|
rrO′ |
O′ |
|
x |
O |
|
|
η |
ξ |
|
|
|
|
|
|
|
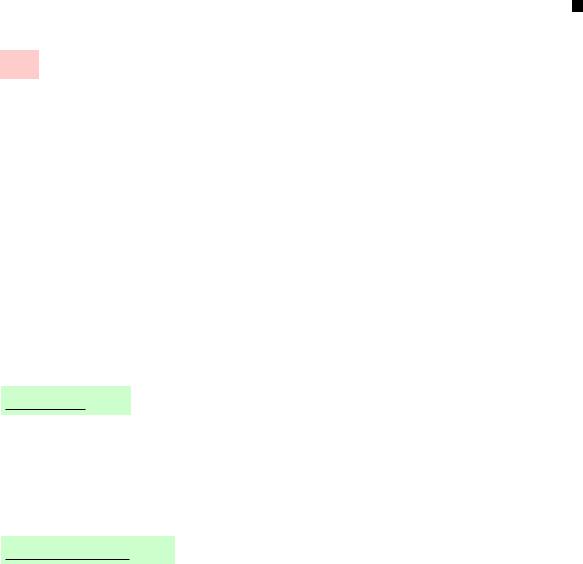
Рисунок 3.1 |
|
||
§4. Теорема сложения ускорений в сложном движении точки
−−→
−−−→Здесь мы тоже используем обозначения ~r = OM , ~v , w~, %~ =
O0M , ~vr , w~r , ~ve , w~e , ω~ , введенные в §1. Кроме того, мы используем обозначение w~c = 2ω~ × ~vr , эту векторную величину называют
ускорением Кориолиса или вращательным ускорением точки в ее сложном движении.
Теорема 4.1. (Формула Кориолиса сложения ускорений)
Абсолютное, переносное, относительное и вращательное ускорения в сложном движении точки связаны следующим равенством:
w~ = w~e + w~r + w~c. |
(4.1) |
Доказательство. Дифференцируя равенство (3.1), получаем:
w~ = d~v/dt = d~ve/dt + d~vr/dt. |
(4.2) |
Из теоремы 2.2 следует, что
d~vr/dt = d0~vr/dt + ω~ × ~vr = w~r + ω~ × ~vr. |
(4.3) |
Пусть ~ε = d~ω/dt (угловое ускорение подвижного репера). По формуле Эйлера получаем, что ~ve = ~vO0 + ω~ × (~r − ~rO0 ), поэтому,
81
Перейти к оглавлению на странице: 256
используя еще раз формулу ~v = ~ve + ~vr , приходим к равенствам:
d~ve/dt = w~O0 + ~ε × (~r − ~rO0 ) + ω~ × (~v − ~vO0 ) = |
(4.4) |
= w~O0 + ~ε × (~r − ~rO0 ) + ω~ × (~ve − ~vO0 ) + ω~ × ~vr. |
|
Из формулы (7.11) главы 4 следует, что сумма первых трех слагаемых справа в (4.4) равна w~e , поэтому
d~ve/dt = w~e + ω~ × ~vr. |
(4.5) |
Из равенств (4.2), (4.3), (4.5) следует формула Кориолиса (4.1).
Что и требовалось.
§5. Теорема о сложении угловых скоростей в сложном движении твердого тела
Рассмотрим n + 1 репер (O,~ei,1,~ei,2,~ei,3), i [1 : n + 1] с центром в неподвижной точке O твердого тела, и предположим, что первый и последний из этих реперов совпадают с неподвижным
~ ~ ~
и подвижным реперами (O,~eξ,~eη,~eζ) и(O, i, j, k) соответственно, а подвижный репер жестко связан с движущимся твердым телом.
Пусть при i [1 : n] репер (O,~ei+1,1,~ei+1,2,~ei+1,3) движется относительно репера (O,~ei,1,~ei,2,~ei,3) с угловой скоростью ω~i . В этом случае говорят, что твердое тело совершает одновременное вращение с угловыми скоростями ω~1, . . . , ω~n вокруг осей
ω~1/ω1, . . . , ω~n/ωn .
Угловую скорость твердого тела, то есть угловую скорость подвижного репера относительно неподвижного обозначим ω~ .
Теорема 5.1. (Формула сложения угловых скоростей) Если твердое тело совершает одновременное вращение вокруг неподвижной точки с угловыми скоростями ω~1, . . . , ω~n , то его угловая скорость вычисляется по формуле:
ω~ = ω~1 + . . . + ω~n. |
(5.1) |
Упражнение 5.1. Докажите теорему 5.1.
82