

|
Перейти к оглавлению на странице: 256 |
|||
η |
η′ |
|
|
|
|
y |
|
|
|
|
|
|
D |
|
|
ψ |
wGA |
ϕ |
x |
|
A |
|
||
|
|
|
ξ′ |
|
|
|
|
|
|
O |
|
|
|
ξ |
|
Рисунок 5.8 |
|
|
|
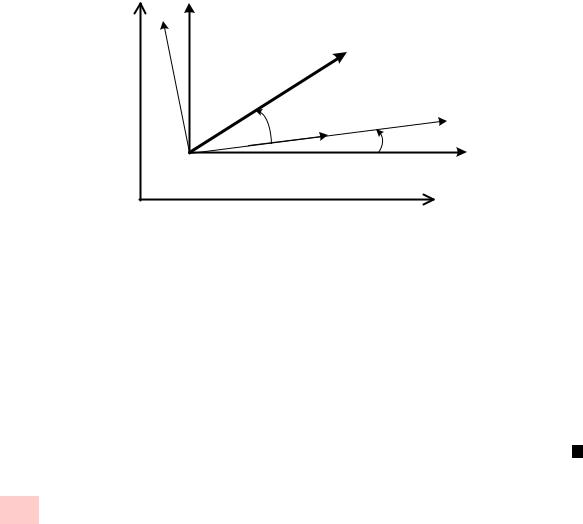
Так как ψ аргумент комплексного числа zD , то получаем:
cos ψ = ϕ˙2 · (ε2 + ω4)−1/2, sin ψ = ϕ¨ · (ε2 + ω4)−1/2, |
(5.26) |
откуда следует последняя формула (5.22). Из неравенства cos ψ > 0 следует, что ψ [−π/2, π/2].
Что и требовалось доказать.
§6. Движение твердого тела вокруг неподвижной точки
Задание движения через углы Эйлера
Координаты произвольной точки M твердого тела в неподвижном и подвижном реперах будем обозначать (ξ, η, ζ) и (x, y, z) соответственно. Начала неподвижного и подвижного реперов поместим в неподвижную точку O твердого тела, и будем использовать
~ ~ ~
для этих реперов обозначения (O,~eξ,~eη,~eζ) и (O, i, j, k).
Как следует из формулы (2.11), связь между координатами точки M в подвижной и неподвижной системах следующая:
65
Перейти к оглавлению на странице: 256
y |
= |
p2,1 |
p2,2 |
p2,3 |
η |
, |
|
x |
|
p1,1 |
p1,2 |
p1,3 |
ξ |
|
|
z |
|
p3,1 |
p3,2 |
p3,3 |
ζ |
|
(6.1) |
η |
= |
p1,2 |
p2,2 |
p3,2 |
y |
. |
|
ξ |
|
p1,1 |
p2,1 |
p3,1 |
x |
|
|
ζ |
p1,3 p2,3 p3,3 |
z |
|
||||
Как мы знаем, девять величин pi,j |
связаны шестью извест- |
||||||
ными независимыми соотношениями, поэтому все эти величины можно выразить через какие-то три параметра. В механике наиболее употребительны в качестве таких параметров углы Эйлера. Мы сейчас введем эти углы, а затем выразим через них pi,j .
~
Символом Π(A,~a, b) будем обозначать плоскость, проходящую
~
через точку A и параллельную векторам ~a, b (это обозначение мы уже использовали в §3, главы 3, см. упражнение 3.1). Символом
~ |
~ |
(~a, b) |
будем обозначать угол между векторами ~a, b, отсчитывае- |
~
мый от ~a к b.
~ ~
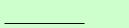
Если плоскости Π(O, i, j), Π(O,~eξ,~eη) не параллельны, то существует их пересечение прямая, ее называют линией узлов. Выберем любое из двух направлений на этой прямой и орт этого направления назовем m~. Три угла Эйлера ϕ, ψ, θ вводятся сле-
~
дующим образом: ϕ = (m,~ i) [0, 2π] угол ротации или угол собственного вращения; ψ = (~eξ, m~) [0, 2π] угол прецессии
иθ = (~eζ, k) (0, π) угол нутации (почему нельзя положить
θ [0, π]?).
Для вывода формул pi,j = pi,j(ϕ, ψ, θ) мы используем, кроме m~, еще два вспомогательных вектора орты m~1 = m~ ×~eζ и m~2 =
~ |
|
|
|
|
m~ × k . |
|
|
|
|
Так как |
|
|
|
|
|
~ |
|
~ |
|
m~2 = − sin ϕ i |
− cos ϕ j, |
|
||
~ |
|
~ |
~ |
~ |
m~1 = cos θ m~2 + sin θ k = − cos θ sin ϕ i |
− cos θ cos ϕ j + sin θ k, |
|||
~ |
|
|
~ |
|
m~ = cos ϕ i |
− sin ϕ j, |
|
||
(6.2)
66

Перейти к оглавлению на странице: 256
|
|
ζ |
|
|
|
|
z |
|
|
|
|
|
|
ϑ |
|
M |
y |
|
|
|
|
|
|
|
|
|
|
rr |
|
|
r |
|
|
|
|
|
m1 |
|
|
|
η |
ϑ |
r |
O |
|
|
|
|
m2 |
|
|
ϑ |
|
|
|
ψ |
r |
ϕ |
|
|
|
m |
|
||
ξ |
|
|
|
|
x |
|
|
|
|
|
|
|
|
Рисунок 6.1 |
|
||
то
~eξ = cos ψ m~ + sin ψ m~1 = |
|
|
|
~ |
~ |
|
|
= cos ψ(cos ϕ i |
− sin ϕ j)+ |
~ |
|
~ |
~ |
|
|
+ sin ψ(− cos θ sin ϕ i − cos θ cos ϕ j + sin θ k) = |
|
||
|
|
~ |
|
= (cos ψ cos ϕ − sin ψ sin ϕ cos θ)i+ |
|
||
|
~ |
~ |
|
+(− cos ψ sin ϕ − sin ψ cos ϕ cos θ)j + sin ψ sin θ k, |
|
||
~eη = sin ψ m~ − cos ψ m~1 = |
|
|
|
~ |
~ |
|
|
= sin ψ(cos ϕ i |
− sin ϕ j)− |
~ |
|
~ |
~ |
|
|
− cos ψ(− cos θ sin ϕ i − cos θ cos ϕ j + sin θ k) = |
|
||
|
|
~ |
|
= (sin ψ cos ϕ + cos ψ cos θ sin ϕ)i− |
|
||
|
~ |
~ |
|
−(sin ψ sin ϕ − cos ψ cos θ cos ϕ)j − cos ψ sin θ k, |
|
||
~ |
~ |
~ |
~ |
~eζ = − sin θ m~2 + cos θ k = − sin θ(− sin ϕ i − cos ϕ j) + cos θ k = |
|||
~ |
~ |
~ |
|
= sin θ sin ϕ i + sin θ cos ϕ j + cos θ k. |
|
||
(6.3)
67
|
|
|
|
Перейти к оглавлению на странице: 256 |
||||||||
Так как |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
~ |
~ |
|
|
+ ζ ~e |
|
, |
|
|
|
OM = x i + y j + z k = ξ ~e + η ~e |
η |
ζ |
(6.4) |
|||||||
~r = −−→ |
|
|
|
|
ξ |
|
|
|||||
|
|
|
|
|
~ ~ |
~ |
последовательно получаем: |
|||||
то умножая скалярно (6.4) на i, j, k |
||||||||||||
|
|
|
|
~ |
|
~ |
~ |
|
|
|
|
|
|
|
x = (~eξ, i)ξ + (~eη, i)η + (~eζ, i)ζ, |
|
|
|
|
||||||
|
|
|
|
~ |
|
~ |
~ |
|
|
|
|
(6.5) |
|
|
y = (~eξ, j)ξ + (~eη, j)η + (~eζ, j)ζ, |
|
|
|
|||||||
|
|
|
~ |
|
~ |
~ |
|
|
|
|
|
|
|
|
z = (~eξ, k)ξ + (~eη, k)η + (~eζ, k)ζ. |
|
|
|
|||||||
Сопоставляя равенства (6.1) и (6.5) и используя разложения |
||||||||||||
(6.3), приходим к следующим выражениям для pi,j : |
|
|
|
|||||||||
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
p1,1 = (~eξ, i) = cos ψ cos ϕ − sin ψ cos θ sin ϕ, |
|
|
|||||||||
|
|
|
~ |
− cos ψ sin ϕ − sin ψ cos θ cos ϕ, |
|
|||||||
p2,1 = (~eξ, j) = |
|
|||||||||||
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
p3,1 = (~eξ, k) = sin ψ sin θ, |
|
|
|
|
|
||||
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
p1,2 = (~eη, i) = sin ψ cos ϕ + cos ψ cos θ sin ϕ, |
|
||||||||||
p |
|
|
~ |
|
sin ψ sin ϕ + cos ψ cos θ cos ϕ, |
(6.6) |
||||||
|
= (~e , j) = |
− |
||||||||||
|
2,2 |
η |
|
~ |
|
|
|
|
|
|
|
|
|
|
p3,2 = (~eη, k) = − cos ψ sin θ, |
|
|
|
|
|
|||||
~
p1,3 = (~eζ, i) = sin ϕ sin θ,
~
p2,3 = (~eζ, j) = cos ϕ sin θ,
~
p3,3 = (~eζ, k) = cos θ.
Теорема 6.1. Пусть
|
p1,1 |
p2,1 |
p3,1 |
|
|
P = |
p1,2 |
p2,2 |
p3,2 |
, |
|
|
p1,3 |
p2,3 |
p3,3 |
|
|
P1(θ) = |
1 |
0 |
0 |
, P3(ψ) = |
cos ψ |
− sin ψ |
0 |
. |
0 |
cos θ |
− sin θ |
sin ψ |
cos ψ |
0 |
|||
|
0 |
sin θ |
cos θ |
|
0 |
0 |
1 |
(6.7) |
|
|
|
|
|
|
|
|
|
Тогда |
|
|
P = P3(ψ)P1(θ)P3(ϕ). |
|
|
(6.8) |
||
|
|
|
|
|
||||
68

Перейти к оглавлению на странице: 256
Доказательство.
I способ.
Равенство (6.8) проверяется перемножением матриц. II способ.
Это доказательство проясняет геометрический смысл равенства (6.8). Кроме уже используемых неподвижного и подвижного реперов рассмотрим еще два репера с центром в той же непо-
~ ~ ~
движной точке O. Репер, из которого получается (O, i, j, k) пово-
~ ~ 0 ~ 0 ~ 0
ротом вокруг k на угол ϕ, назовем (O, i , j , k ). Репер, из которого
~ 0 ~ 0 ~ 0
получается (O, i , j , k ) поворотом вокруг m~ на угол θ, назовем
~ 00 ~ 00 ~ 00
(O, i , j , k ). Как можно видеть, репер (O,~eξ,~eη,~eζ) получается
~ 00 ~ 00 ~ 00 ~ 00
из репера (O, i , j , k ) поворотом вокруг k на угол ψ .
Если координатами точки M в рассматриваемых четырех ре-
~ ~ ~ ~ 0 ~ 0 ~ 0 ~ 00 ~ 00 ~ 00
перах (O, i, j, k), (O, i , j , k ), (O, i , j , k ), (O,~eξ,~eη,~eζ) являются соответственно (x, y, z), (x0, y0, z0), (x00, y00, z00), (ξ, η, ζ), то по-
лучаем следующие их преобразования, соответствующие поворотам на углы ϕ, θ, ψ :
x |
|
|
x |
|
|
x00 |
|
|
x0 |
y00 |
= P3(ϕ) |
y |
, |
y00 |
= P1(θ) |
y0 |
|||
z0 |
|
|
z |
z00 |
|
|
z0 |
||
|
ξ |
|
|
x00 |
|
η |
= P3(ψ) |
y00 |
|||
|
ζ |
|
|
z00 |
|
откуда следует, что |
|
|
y |
. |
η |
= P3(ψ)P1(θ)P3(ϕ) |
|||
ξ |
|
|
x |
|
ζ |
|
z |
|
|
,
(6.9)
(6.10)
Что и требовалось доказать.
Две геометрические теоремы о движении твердого тела вокруг неподвижной точки
Тождественному преобразованию idE3 пространства E3 (см. упражнение 2.1) соответствует такое перемещение твердого тела,
69
Перейти к оглавлению на странице: 256
что начальное и конечное положения каждой его точки совпадают. Это перемещение твердого тела назовем нулевым.
Теорема 6.2. (Эйлер Даламбер) Для любого ненулевого
перемещения Π твердого тела вокруг неподвижной точки существует единственная прямая l (ось вращения) такая, что перемещение Π можно представить как перемещение в результате поворота этого тела вокруг этой оси на некоторый угол α.
Доказательство. Пусть O неподвижная точка тела. Будем
считать, что в начальном положении подвижный и неподвиж-
~ ~ ~
ный реперы (O, i, j, k) и (O,~eξ,~eη,~eζ) совпадают. Пусть (ξ1, η1, ζ1), (ξ2, η2, ζ2) координаты в неподвижном репере произвольной точки M твердого тела (пространства, связанного с телом) в его начальном и конечном положениях соответственно, а (x, y, z) - координаты этой точки в подвижном репере. Используя формулы (6.1) получаем:
η1 |
= I |
y |
, |
η2 |
ξ1 |
|
x |
|
ξ2 |
ζ1 |
· z |
ζ2 |
||
x
= P · y , (6.11) z
где I – единичная матрица, P – ортогональная, det P = 1 и P 6= I . Мы должны показать, что множество точек M (x, y, z), удовлетворяющих равенству (ξ1, η1, ζ1) = (ξ2, η2, ζ2), то есть равенству
x |
|
0 |
|
|
(P − I) · y |
= |
0 |
, |
(6.12) |
z |
|
0 |
|
|
это множество всех точек некоторой прямой, проходящей через
(0, 0, 0).
Эту задачу можно переформулировать так: мы должны доказать, что среди собственных значений λ матрицы P есть значение λ1 = 1 и ему соответствует одномерное подпространство собственных векторов. Для того, чтобы сделать это, мы покажем, что λ1 = 1 является корнем характеристического полинома d(λ) = det(P −λI) и что кратность этого корня равна единице (при P 6= I !).
70
|
|
|
Перейти к оглавлению на странице: 256 |
|||||||
Действительно, из цепочки равенств |
|
|
|
|
|
|||||
d(1) = det(P − I) = det(P T − IT ) = det(P −1 − I) = |
|
|||||||||
= det(P (P −1 |
− |
I)) = det(I |
− |
P ) = det( |
− |
(P |
− |
I)) = |
(6.13) |
|
|
3 |
|
|
|
|
|||||
= (−1) |
det(P − I) = −d(1) |
|
|
|
|
|||||
следует, что величина λ1 = 1 является корнем полинома d(λ).
Упражнение 6.1. Доказать, что кратность корня λ1 = 1
равна единице.
Что и требовалось доказать.
Упражнение 6.2. Найти угол α и прямую l из теоремы 6.2 Эйлера Даламбера (через элементы матрицы P или углы Эйлера).
Пусть M произвольная точка твердого тела, движущегося вокруг неподвижной точки O, а ~r(t), ~r(t + t) радиус-векторы этой точки в моменты t и t+Δt. Вектор ~r = ~r(t+Δt)−~r(t) это перемещение точки M за время от t до t + t. В соответствии с
теоремой Эйлера – Даламбера, его можно вычислить как перемеще-
−→
ние при вращении вокруг некоторой оси на угол ϕ (эта векторная
величина направлена вдоль упомянутой оси согласно определению угла поворота). Из формулы (4.1) следует, что
ϕ |
× |
~r + ~o(Δt) |
при |
t |
→ |
0. |
(6.14) |
|
~r = −→ |
|
|
|
|
||||
Если существует вектор |
|
|
|
|
|
|
|
|
ω~ = |
ϕ/ t), |
|
|
|
(6.15) |
|||
|
|
|
lim (−→ |
|
|
|
|
|
t→0
то прямую, проходящую через неподвижную точку O и параллельную этому вектору, называют мгновенной осью вращения твердого тела в момент t, а сам вектор ω~ его мгновенной угловой скоростью в момент t.
Вектор ω~ можно рассмотреть как функцию времени t. В отличие от случая вращения твердого тела вокруг неподвижной оси, здесь ω~ с изменением t меняет, вообще говоря, не только свою величину, но и направление (здесь полезно вспомнить также определение ω~ в случае плоского движения твердого тела см. §5). Из
71
|
|
|
Перейти к оглавлению на странице: 256 |
||||||
формулы (6.14) получаем |
|
|
|
|
|
|
|
||
lim (Δ~r/ |
t) = lim (−→ |
t) |
× |
~r, |
(6.16) |
||||
t |
|
ϕ/ |
|||||||
t |
→ |
0 |
→ |
0 |
|
|
|||
то есть |
|
|
|
|
|
|
|
||
|
|
~v = ω~ × ~r, |
|
|
|
(6.17) |
|||
|
|
|
|
|
|
||||
Это формула Эйлера. Если точка M лежит на оси вращения, то
~
есть ~r = α~ω , то из (6.17) следует равенство ~v = 0.
Упражнение 6.3. Докажите, что угловую скорость твердого тела с неподвижной точкой можно вычислить по формуле (см. теорему 6.1):
˙ |
˙ |
~ |
(6.18) |
ω~ = ψ~eζ + θ~m + ϕ˙k. |
|||
Геометрическое место мгновенных осей вращения в неподвижном и подвижном реперах называют неподвижным и подвижным аксоидом соответственно. Аксоиды конические поверхности с вершиной в неподвижной точке O. Если рассмотреть их в неподвижном пространстве, то положение подвижного аксоида будет меняться с течением времени t, а положение неподвижного аксоида не зависит от времени. В каждый момент t эти поверхности имеют общую прямую мгновенную ось вращения l(t).
Теорема 6.3. (Пуансо) При движении твердого тела, имеющего неподвижную точку, подвижный аксоид катится без скольжения по неподвижному.
Пояснение. Мгновенная ось вращения l(t) (в момент t это общая прямая двух аксоидов) с изменением t перемещается по обоим аксоидам. Пусть C(t) произвольно выбранная точка прямой l(t), отличная от O. Точка C(t) с течением времени перемещается по некоторым кривым на неподвижном и подвижном аксоидах со
ˆ
скоростями ~v(t),~v(t). Содержание теоремы Пуансо состоит в том,
ˆ
что ( t J)(~v(t) = ~v(t)), где J промежуток, на котором рассматривается движение твердого тела.
Упражнение 6.4. Докажите теорему 6.3
72
Перейти к оглавлению на странице: 256
Проекции угловой скорости тела с неподвижной точкой
~ ~ ~
Используя разложения ортов m,~~eξ по i, j, k (см. §6), и проек-
~ ~ ~
тируя равенство (6.18) на орты i, j, k , получаем:
ωx = ψ˙ sin ϕ sin θ + θ˙ cos ϕ,
ωy = ψ˙ cos ϕ sin θ − θ˙ sin ϕ, ωz = ψ˙ cos θ + ϕ˙.
~ ~ |
~ |
следующие: |
Разложения ортов i, j, k по ортам ~eξ,~eη,~eζ |
||
~ |
+ p1,2~eη + p1,3~eζ, |
|
i = p1,1~eξ |
|
|
~ |
~ |
|
j = p2,1~eξ + p2,2~eη + p2,3~eζ, k = p3,1~eξ + p3,2~eη + p3,3~eζ.
(6.19)
(6.20)
Используя эти формулы, формулы (6.6) для pi,j и разложение
орта |
~ ~ ~ |
по ортам ~eξ,~eη,~eζ . |
|
m~ по i, j, k , получаем разложение орта m~ |
|||
|
~ |
|
и проектируя |
Используя теперь разложения ортов m,~ k по ~eξ,~eη,~eζ |
|||
равенство (6.18) на оси ~eξ,~eη,~eζ , получаем: |
|
|
|
|
ωξ = ϕ˙ sin ψ sin θ + θ˙ cos ψ, |
˙ |
(6.21) |
|
˙ |
||
|
ωη = −ϕ˙ cos ψ sin θ + θ sin ψ, ωζ = ϕ˙ cos θ + ψ. |
|
|
Ускорение точек тела, имеющего неподвижную точку
Дифференцируя формулу Эйлера ~v = ω~ × ~r, получаем:
w~ = ~ε × ~r + ω~ × ~v = ~ε × ~r + ω~ × (ω~ × ~r), |
(6.22) |
|
˙ |
= ~ε × ~r, w~2 = ω~ × (ω~ × ~r) называют |
|
где ~ε = ω~ . Векторы ~ε, w~1 |
||
угловым, вращательным и осестремительным ускорениями тела соответственно. Теперь мы получим другое выражение для w~2 ,
тогда станет более понятным и название этого вектора. |
|
||||
~ |
~ |
|
|
|
|
Пусть ~r = h+%~, где h векторная проекция ~r на мгновенную |
|||||
|
~ |
то получаем: |
|
||
ось вращения тела. Так как h k ω~ , %~ ω~ |
|
||||
|
~ |
|
2 |
%~. |
(6.23) |
w~2 = ω~ × (ω~ × (h + %~)) = ω~ × (ω~ × %~) = −ω |
|
||||
Итак, равенство (6.22) мы можем записать в следующей фор- |
|||||
ме: |
|
|
|
|
|
w~ = w~1 + w~2, w~1 = ~ε × ~r, w~2 = −ω2%~. |
(6.24) |
||||
73