


Перейти к оглавлению на странице: 256
ГЛАВА 3. КИНЕМАТИКА ТОЧКИ
Движение, скорость и ускорение точки находятся в ряду основных понятий механики. Их вычисление или исследование не всегда целесообразно в декартовых координатах. В настоящей главе мы получим формулы для проекций скорости и ускорения точки на оси криволинейной (§1, §2) и естественной (§3, §4) систем координат и рассмотрим два простых, но важных примера – движение точки по прямой и по окружности (§5). Но до этого необходимо ввести в рассмотрение для модели кинематики точки понятия пространства, механической системы, движения, перемещения, скорости и ускорения.
В качестве пространства будем использовать аффинное евклидово пространство En, n = 1, 2, 3; точку этого пространства будем представлять радиус–вектором ~r в какой-либо декартовой системе
|
|
~ ~ |
~ |
координат; например, если n = 3, а i, j, k – орты системы Oxyz , |
|||
~ |
~ |
~ |
|
то ~r = (x, y, z) = xi |
+ yj |
+ zk . |
|
Механической системой в момент t0 или положением системы в момент t0 будем называть точку M0 в En, n = 1, 2, 3. Пусть J – промежуток на R. Движением этой системы (точки)
будем называть дважды непрерывно дифференцируемую функцию D : J −→ En времени t такую, что D(t0) = M0 . В частности, если точка этого пространства представлена радиус–вектором ~r в какойлибо декартовой системе координат, то ее движение представляется вектор–функцией ~r : J −→ Rn . В этом случае скоростью и ускорением точки в этом движении называют соответственно
˙ ¨
вектор–функции ~v = ~r, w~ = ~r, а траекторией точки называют кривую {~r(t) Rn |t J}.
Замечание 1. Наряду с df/dt, d2f/dt2, . . . для производных f по аргументу t, мы используем, как это принято в механике, и обозначения f˙, f¨, . . ..
§1. Коэффициенты Ламе. Проекции скорости точки на оси криволинейной системы координат
Так как
∂~r |
|
∂x ~ |
∂y ~ |
∂z ~ |
|
|||
|
= |
|
i + |
|
j + |
|
k = Hm~τm, |
(1.1) |
∂qm |
∂qm |
∂qm |
∂qm |
|||||
19

Перейти к оглавлению на странице: 256
где
Hm = |
∂qm |
|
= s ∂qm |
2 |
|
∂qm |
2 |
+ |
∂qm |
2 |
(1.2) |
||||||||
+ |
|
, |
|||||||||||||||||
|
|
∂~r |
|
|
∂x |
|
|
∂y |
|
|
|
∂z |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
то |
|
|
|
|
|
|
|
|
|
∂~r |
|
|
|
|
|
|
|
|
|
|
|
|
|
~τm = (Hm)−1 |
|
. |
|
|
|
|
|
|
(1.3) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
∂qm |
|
|
|
|
|
|
|
|||
Величины Hm (иногда удобнее обозначение Hqm ) называют коэффициентами Ламе. При помощи формул (1.1), (1.3) мы найдем направляющие косинусы осей локального базиса криволинейной системы координат ~q = (q1, q2, q3) относительно осей декартовой системы Oxyz и разложение вектора скорости точки в этом базисе. Из формулы (1.3) получаем:
~ |
~ |
−1 ∂x |
|
|
|
|
cos (~τm, i) = ~τmi = (Hm) |
|
|
, . . . , |
m = 1, 2, 3. |
(1.4) |
|
|
∂qm |
|||||
Движением |
точки в криволинейных |
координатах |
~q = |
|||
(q1, q2, q3) называют ~q = (q1(t), q2(t), q3(t)) – дважды непрерывно дифференцируемую вектор–функцию аргумента t (времени) на промежутке J R.
Функции q˙1, q˙2, q˙3 и q¨1, q¨2, q¨3 называют соответственно обобщенными скоростями и ускорениями точки в этом движении, а кривую (множество точек) {(q1, q2, q3) R3 | q1 = q1(t), q2 = q2(t), q3 = q3(t), t J} – траекторией точки в криволинейных координатах.
Теорема 1.1. Пусть ~q = (q1(t), q2(t), q3(t)) – движение точки,
|
|
|
|
|
|
|
|
˙ |
|
(то есть на |
|
а vqm – проекция вектора скорости ~v = ~r на qm |
|||||||||||
ось ~τm ). Тогда: |
|
|
|
|
|
|
|
|
|||
|
|
|
vqm = Hqm q˙m, |
m = 1, 2, 3. |
|
(1.5) |
|||||
Доказательство. |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как |
˙ |
∂~r |
∂~r |
∂~r |
|
|
||||
|
|
|
|
|
|||||||
|
~v = ~r = |
|
q˙1 + |
|
q˙2 + |
|
q˙3 |
, |
(1.6) |
||
|
∂q1 |
∂q2 |
∂q3 |
||||||||
20
Перейти к оглавлению на странице: 256
то из формулы (1.1) получаем:
~v = H1q˙1~τ1 + H2q˙2~τ2 + H3q˙3~τ3, |
(1.7) |
откуда и следует (1.5).
Следствие 1.1. Если криволинейная система ортогональна, то
q
v = (H1q˙1)2 + (H2q˙2)2 + (H3q˙3)2,
(1.8)
cos (~v, ~τm) = Hmq˙mv−1, m = 1, 2, 3.
Пример 1.1. Рассмотрим цилиндрическую систему координат. Так как
∂x∂% = cos ϕ, ∂y∂% = sin ϕ, ∂%∂z = 0,
∂x |
|
|
∂y |
|
|
|
|
∂z |
(1.9) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
∂ϕ = −% sin ϕ, |
∂ϕ = % cos ϕ, |
∂ϕ = 0, |
|||||||||||||
|
|||||||||||||||
|
∂x |
= 0, |
∂y |
= 0, |
∂z |
= 1, |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
∂z |
|
∂z |
|
∂z |
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||
то легко проверить, что условия ортогональности (2.4) главы 2 выполнены.
Так как |
|
|||
H% = 1, Hϕ = %, Hz = 1, |
(1.10) |
|||
то |
|
|||
v% = %,˙ vϕ = %ϕ,˙ vz = z˙. |
(1.11) |
|||
Из ортогональности цилиндрической системы коорди- |
||||
нат следует, что |
|
|||
v = q |
|
, |
|
|
(%˙)2 + (%ϕ˙)2 + (z˙)2 |
(1.12) |
|||
cos (~v, ~τ%) = %v˙ −1, |
(1.13) |
|||
cos (~v, ~τz) = zv˙ −1, cos (~v, ~τϕ) = %ϕv˙ |
||||
−1. |
||||
21
|
|
|
|
|
|
|
|
|
|
|
Перейти к оглавлению на странице: 256 |
||||||||
|
|
|
|
Точка движется в плоскости z = 0 с постоян- |
|||||||||||||||
|
Пример 1.2. |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
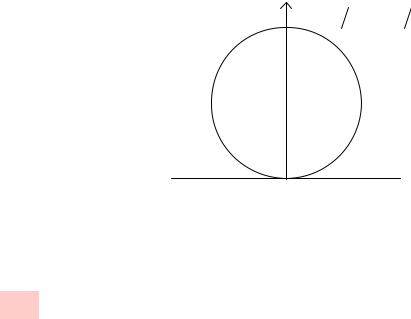
ной по модулю скоростью v = v0 . Ее полярная координата ϕ |
||||||||||||||||||
|
в этом движении изменяется по закону ϕ(t) = ω0t, где ω0 > 0 |
||||||||||||||||||
|
– постоянная. Кроме того, известно, что %(0) = 0, %˙(0) > 0. |
||||||||||||||||||
|
Найти траекторию точки в виде % = %(ϕ). |
|
|
|
|||||||||||||||
|
|
Решение |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
Из формулы (1.12) следует, что (%˙)2 + (%ϕ˙)2 = v0 |
2 . Так |
||||||||||||||||
|
то |
0 |
|
|
|
0 |
− |
0 |
|
, |
p |
|
|
|
0 |
0 |
|
||
|
как ϕ˙ > 0 |
и %˙(0) > 0, то %˙ = |
|
v02 − %2ω02 . Так как t = ϕ/ω0 , |
|||||||||||||||
|
|
|
. |
.p |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
%2ω 2 = dϕ |
откуда получаем arcsin (ω %/v ) = |
|||||||||||||
|
|
ω d% |
v 2 |
|
|||||||||||||||
|
ϕ + c |
|
Так как |
%(0) = 0, то |
c = 0, и мы получаем % = |
||||||||||||||
|
(v0/ω0) sin ϕ. Это уравнение окружности радиуса a = (v0/ω0) |
||||||||||||||||||
|
с центром в точке (0, a/2) (Рис. 1.1). |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
ρ(π 2)=v |
ω |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
||
x
Рисунок 1.1
§2. Проекции ускорения точки на оси ортогональной криволинейной системы координат
|
Формулу (1.6) запишем в виде: |
|
|
|
|
|
|
|
|
|
|||
|
˙ |
˙ |
∂~r |
|
∂~r |
|
∂~r |
|
|||||
|
~v = ~r = ~v(q1, q2 |
, q3, q˙1, q˙2, q˙3) = ~v(~q, ~q) = |
|
q˙1 |
+ |
|
q˙2 |
+ |
|
q˙3 |
. (2.1) |
||
∂q1 |
∂q2 |
∂q3 |
|||||||||||
|
|
|
|
Пусть wqm – проекция ускорения w~ на ось |
|||||||||
|
Теорема 2.1. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
qm , то есть на вектор ~τm , и используются обозначения (2.1) и T = 12v~ = 12 v2 . Тогда, если криволинейная система коор-
22

Перейти к оглавлению на странице: 256
динат (q1, q2, q3) ортогональна, то |
|
wqm = Hqm −1Eqm (T ), |
(2.2) |
где Eqm (T ) – линейный дифференциальный оператор (оператор Эйлера–Лагранжа), определяемый равенством
|
|
|
|
|
Eqm (T ) = |
d |
∂T |
|
− |
|
∂T |
(2.3) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||
|
|
|
dt |
∂q˙m |
∂qm |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Доказательство. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как wq |
|
= d~v ~τm, ~τm = H |
−1 |
|
|
∂~r |
|
(см. (1.3) ), то |
|
||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
m |
|
|
dt |
|
|
|
qm ∂qm |
|
|
|
|
|||||||
|
|
|
|
|
Hqm wqm = |
d~v |
|
|
∂~r |
|
, |
|
(2.4) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
dt ∂qm |
|
|||||||||
поэтому для доказательства теоремы мы должны показать, что
d~v ∂~r |
= |
d ∂T |
− |
∂T |
(2.5) |
|||||
|
|
|
|
|
|
|
. |
|||
dt ∂qm |
dt |
∂q˙m |
∂qm |
|||||||
Так как
d |
~v |
∂~r |
= |
d~v |
|
∂~r |
+ ~v |
d |
|
∂~r |
, |
(2.6) |
|
∂qm |
dt ∂qm |
|
|
||||||||
dt |
|
|
|
dt ∂qm |
|
|||||||
то равенство (2.5) будет доказано если в (2.6) использовать формулы:
d ∂~r |
|
= |
|
∂~v |
, |
(2.7) |
|||||||
|
|
|
|
|
|
|
|
|
|||||
dt ∂qm |
∂qm |
|
|||||||||||
|
|
∂~r |
= |
|
∂~v |
(2.8) |
|||||||
|
|
|
|
|
, |
||||||||
|
∂q |
m |
∂q˙ |
||||||||||
|
|
|
|
|
|
|
|
m |
|
||||
Остается доказать эти равенства. Второе из них следует непосредственно из формулы (2.1), а первое – из очевидных равенств:
|
|
∂~v |
|
3 |
|
∂2~r |
|
|||||
|
|
X |
|
|||||||||
|
|
|
|
|
= |
|
|
|
q˙m, |
(2.9) |
||
|
|
|
|
|
|
|||||||
|
|
∂qk |
|
|
∂qm ∂qk |
|
||||||
|
|
|
|
|
|
m=1 |
|
|
|
|
||
(получено дифференцированием равенства (2.1)), |
|
|||||||||||
|
d ∂~r |
|
3 |
|
∂2~r |
|
||||||
|
|
X |
|
|||||||||
|
|
|
|
|
|
= |
|
|
q˙m |
(2.10) |
||
dt ∂qk |
|
|
|
|
||||||||
|
m=1 |
∂qk ∂qm |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||
(получено по формуле дифференцирования сложной функции). Что и требовалось.
23