

7.3. Транспортні задачі в операційному менеджменті
Транспортна задача за критерієм часу
В реальних економічних розподільчих задачах з перевезеннях критерієм оптимальності є загальна вартість перевезень f. Однак виникають ситуації коли є сенс за критерій оптимальності використовувати час Т; у продовж якого всі перевезення будуть здійснені. Наприклад, у разі перевезень продуктів, що швидко псуються, більш важливим є не вартість перевезень а їх тривалість. Така транспортна задача зветься транспортною задачею із критерієм часу.
В
транспортній задачі за критерієм часу
найкращім планом перевезень
![]() є той план тривалість перевезень Т
за яким мінімальна: T→
min.
є той план тривалість перевезень Т
за яким мінімальна: T→
min.
Приклад 7.3.1
Хай
задані M
пунктів (складів): А1,А2,....,АM
в яких містяться запаси вантажу: а1,
а2,...,
аN,;
N
пунктів призначення В1,
В2,....,ВN,
що надали замовлення на вантаж в об’ємі
b1,
b2,...,
bМ,
і час перевезення tij
із пункту Ai
до пункту Bj
(Ai→Bj;
tij,
i=1,2,…,M,
j=1,2,…,N).
Потрібно за min
термін Т(Т→
min)
організувати перевезення вантажів
{хij}
із Аi
до Bj
таким чином, щоб з кожного пункту
відправлення Аi
увесь об’єм вантажу ai
було
вивезено:
![]() ,
(7.43) і до кожного пункту призначення
Bj
увесь вантаж у відповідності з
замовленням bj
було завезено:
,
(7.43) і до кожного пункту призначення
Bj
увесь вантаж у відповідності з
замовленням bj
було завезено:
![]() ,
(7.44).
,
(7.44).
Означимо
час конкретних перевезень хij
як tij
у термінах Т.
План перевезень буде вважатись виконаним
в той час коли закінчується найбільш
тривала із усіх перевезень, тобто
тривалість плану перевезень Т
визначатиметься максимальною тривалістю
tij
не нульових перевезень:
![]() (7.45
). Таким
чином потрібно відшукати план перевезень
{хij},
що задовольнятиме умовам
→
min.(
7.46 ).
(7.45
). Таким
чином потрібно відшукати план перевезень
{хij},
що задовольнятиме умовам
→
min.(
7.46 ).
Зауважимо, що транспортна задача за критерієм часу не є задачею лінійного програмування, оскільки цільова функція Т не є лінійною функцією змінних хij.
Вирішення транспортної задачі за критерієм часу може бути досягнуто методом заборонених комірок . Цей метод складають два етапи:
відшукується початковий допустимий план;
отриманий план поступово покращується (прискорюється).
Приклад 7.3.2
Маємо транспортну таблицю, де у правому верхньому куті кожної комірки вписано час відповідних перевезень tij (табл.7.21).
Таблиця 7.21. Метод заборонених комірок.
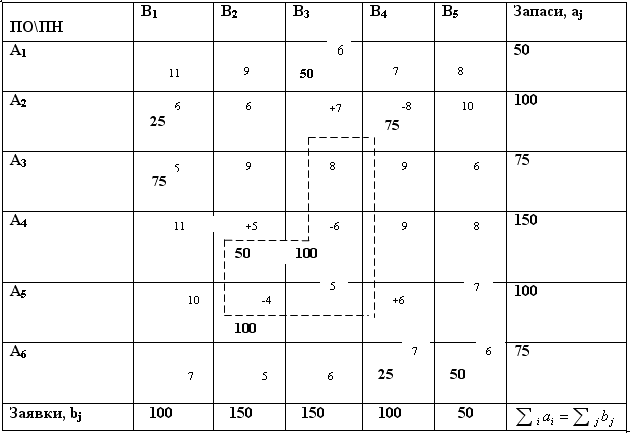
Для визначення початкового припустимого плану перевезень можна використовувати відомий метод “північно-західного кута”, або метод найменшого елементу.
Припустиме
рішення: х52,
х31,х42,
х43,
х13,
х21,
х65,
х64,
х24
(перевезення xij
наведені у черговості їх визначення)
отримане методом найменшого елементу
і наводиться в табл. 7.21. Час знайденого
шляху перевезень Т
визначається умовою:
![]() якщо
якщо
![]() .
Щоб зменшити Т
.
Щоб зменшити Т
перевозу х24 треба розмістити у клітинці яким відповідають перевезення з tij<t24.
Більш швидкий план {хij} не може містити перевезень з tij>t24 тому із подальшого розгляду виключаються всі такі клітинки ( викреслимо їх). При змінені допустимого плану перевезень {хij} із збережень обмежень, також використовується поняття циклу транспортної таблиці. Однак на відміну розподільчого методу, де цим поняттям оперують, або метода потенціалів позитивні вершини циклу можуть спиратись на клітинки із нульовими перевезеннями. Щоб перенести х24 в інші клітинки помітимо клітинку А2В4 ознакою “ - “ і побудуємо з неї цикл. Вершини цього циклу – клітинки А5В4, А5В2,А4В2,А4В3 і А2В3 – помічені відповідними ознаками “+” і “-“. Мінімальні значення які можна пересунути по цьому циклу, х24 = 75.
Новий більш швидкий план перевезень {хij} наведено в табл. 7.22
Т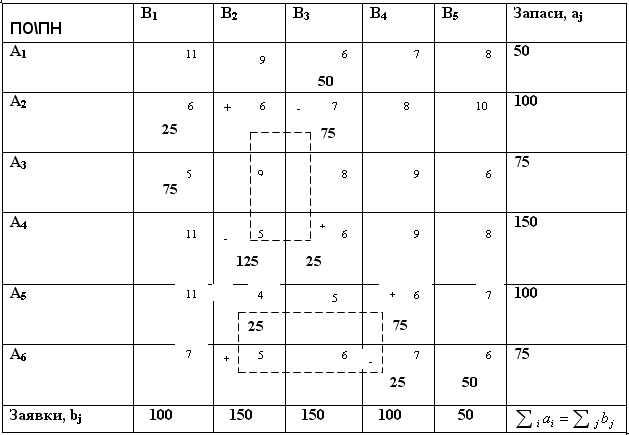 аблиця
7.22.
Другий крок ітерації
аблиця
7.22.
Другий крок ітерації
Час цього плану Т дорівнює t23 = t64 = 7, тому із подальшого розподілу викреслюємо клітинки з tij = 8. Побудуємо цикли із клітинок А2,В3 і А6В4. Вершинами першого циклу є клітинки А2В3, А4В3, А4В2 і А2В2, другого – А6В4, А6в2, А5В2, і А5В4. За першим циклом (із А2В3) можна перекинути 75 одиниць, а за другим (із А6В4) – 25 одиниць. Результат наступних третього і четвертого ітераційних кроків записані в табл. 7.23.
Таблиця 7.23. Результат третього і четвертого ітераційних кроків
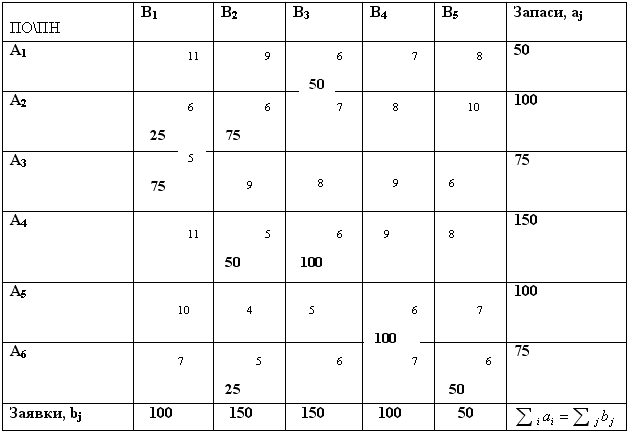
Час припустимого плану, що отримано - Т = 6. Викреслимо із подальшого розглядання комірки із tij = 7. Аналіз таблиці 7.23 дозволяє зробити висновок, що створити більш швидкий план із Т < 6 неможливо.