

2. 2. 2 Графическое дифференцирование.
Пусть имеем графикS (t) pис2.3S0 -начальное отклонение. По графику для точки В, зная масштабы имеем
![]()
Скорость
в любой момент времени есть
![]() .
Дифференцируя
S
и t. получим
.
Дифференцируя
S
и t. получим
![]() ,
,![]() -.
элементарное
перемещение за
элементарное время
-.
элементарное
перемещение за
элементарное время
![]() ,
тогда
,
тогда
![]()
Для
точки В, бесконечно
близкой к точке В координаты равны
![]() .
Отношение
.
Отношение
![]() ,
где
,
где
![]() - угол наклона касательной в точке В.
Учитывая это
для скорости точки В имеем
- угол наклона касательной в точке В.
Учитывая это
для скорости точки В имеем
![]() т.
е. скорость
пропорциональна отношению масштабов
перемещения и времени и углу наклона
касательной.
т.
е. скорость
пропорциональна отношению масштабов
перемещения и времени и углу наклона
касательной.
Рассмотрим методику графического дифференцирования. Зададим графикS(t). Разобьем ось на равное число отрезков и проведем в этих точках ординаты. В точках пересечения ординат с графиком S (t) проводим касательные.
Выбрав систему координат V, t на продолжении оси откладываем отрезок Н произвольной длины. Начало отрезка Н называется полюсом, а Н - полюсное расстояние. Из полюса проводим прямые параллельные касательным графикаS(t). Из точек пересечения касательных с осью V проводим прямые параллельные оси t и находим точки пересечения их (т. 1, 2, 3, и т. д.) с соответствующими ординатами из точек 1, 2, 3, и т. д. на осиt. Соединив полученные точки пересечения плавной кривой находим график скорости V(t).
Имеем
![]() и после деления
второго выражения на первое
и после деления
второго выражения на первое
![]() .
Из рассмотрения графиков S(t),V(t)
следует:
.
Из рассмотрения графиков S(t),V(t)
следует:
1. Максимальной или минимальной ординате графика перемещений соответствует нулевая ордината графика скорости.
2. Точкам перегиба S(t) соответствует максимум или минимум графикаV(t).
Когда
по графику V (t)
нужно построить
график ускорений, то связь между
масштабами следующая
![]()
Рассмотренный метод дифференцирования носит название метода касательных. Существует и метод хорд, обратный методу интегрирования с помощью хорд.



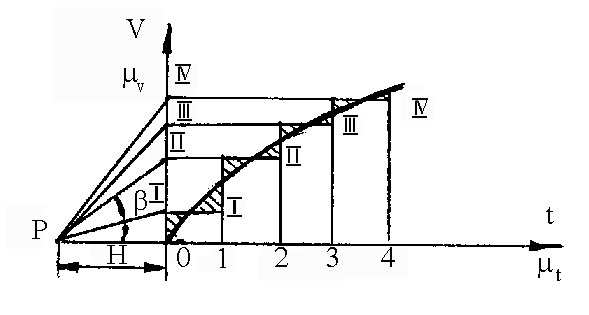

2.2.3 Графическое интегрирование.
Задан
график V(t)
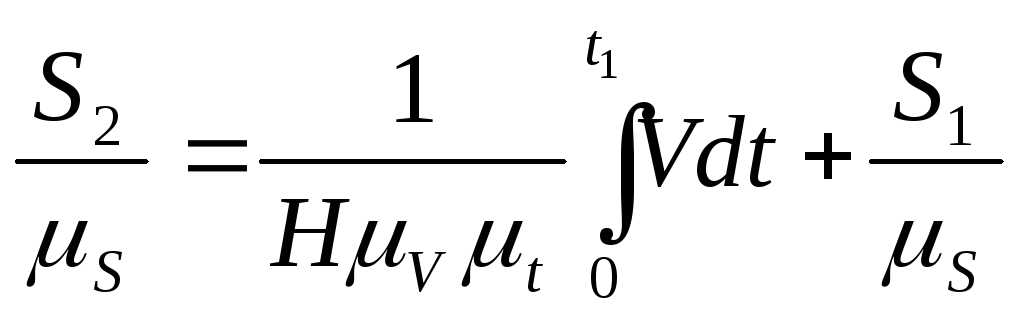
рис.2.6. Аналитически
задача интегрирования решается как
![]() гдеS0-
начальное перемещение. Зная масштабы,
запишем:
гдеS0-
начальное перемещение. Зная масштабы,
запишем:
![]() ,
тогда
,
тогда
![]() .
.
Интеграл
в последующей зависимости есть площадь
на графике скорости между ординатамиV0
и V1
![]() ,
где
,
где
![]() -квадратичный
масштаб, F
- площадь,
-квадратичный
масштаб, F
- площадь,
![]()
Таким образом, перемещение за время пропорционально площади, заключенной между ординатами начальной и конечной скорости за это же время, умноженной на квадратичный масштаб.
Рассмотрим технику интегрированиярис. 2.6. Делим график ординатами. Получаем четырехугольники с криволинейным очертанием. Заменяем площадь этих фигур, площадью равновеликого прямоугольника. Прямые 1-1, 2-2, 3-3 и т. д. следует проводить так, чтобы заштрихованные площади были равны. На продолжении оси t графикаV(t) влево откладывает полюсное расстояние Н. Полюс соединяем с точками на оси OV пересечения её с прямыми 1-1, 2-2. Из начала координат графика S(t) проводим хорды параллельные соответствующим прямым графикаV(t) выходящим из полюса. Эти прямые на графикеS(t) при пересечении с ординатами из точек разметки оси определяют перемещение в выбранный момент времени 0, 1, 2, 3, т. д.
Рассмотрим подобные треугольники
 или
или
откуда
![]() .
.
Лекция 5
План лекции