

2.5.3 Определение положения точек в пространственных кинематических цепях.
2.5.4 Уравнения преобразования координат для кинематических пар.
2.5.5 Определение положения захвата пространственного манипулятора в неподвижной системе координат.
2.5.3 Определение положений точек звеньев в пространственных кинематических цепях.
Рассмотрим
два звена
![]() и
и
![]() .
С каждым из них свяжем свою систему
координат
.
С каждым из них свяжем свою систему
координат
![]() и
и![]()
Движение
звена
![]() относительно
звена i
можно разложить на переносное
поступательное и относительное
вращательное.
относительно
звена i
можно разложить на переносное
поступательное и относительное
вращательное.
Переносное
поступательное движение характеризуется
параллельным переносом осей
координатной системы
![]() в новое
положение с осями
в новое
положение с осями
![]() и с координатами начала
и с координатами начала![]() в системе
в системе![]() .
.
О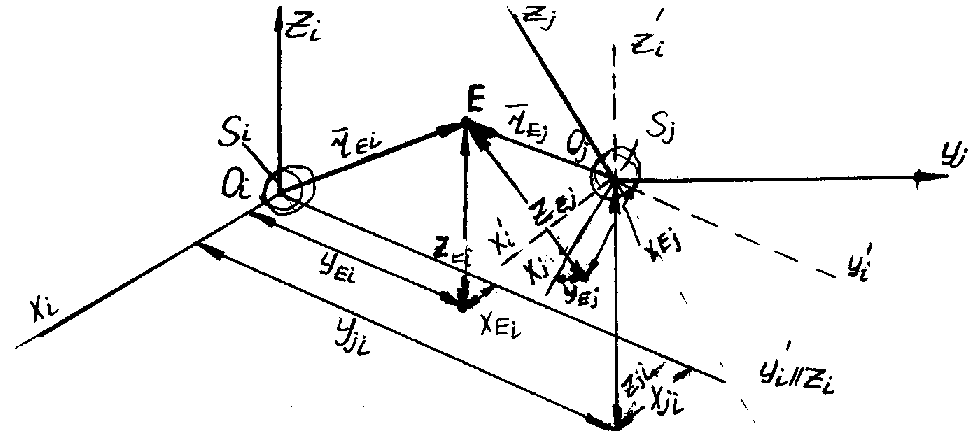 тносительное
вращательное движение характеризуется
поворотом осей системы
тносительное
вращательное движение характеризуется
поворотом осей системы![]() относительно
относительно
![]() ,
выраженное через углы Эйлера.
,
выраженное через углы Эйлера.
Рис. 2.13. Преобразование координатных систем.
2. 14 Преобразование координатных систем.
Выразим
координаты произвольной точки Е в
системе
![]() .
В соответствии с правилами аналитической
геометрии
.
В соответствии с правилами аналитической
геометрии
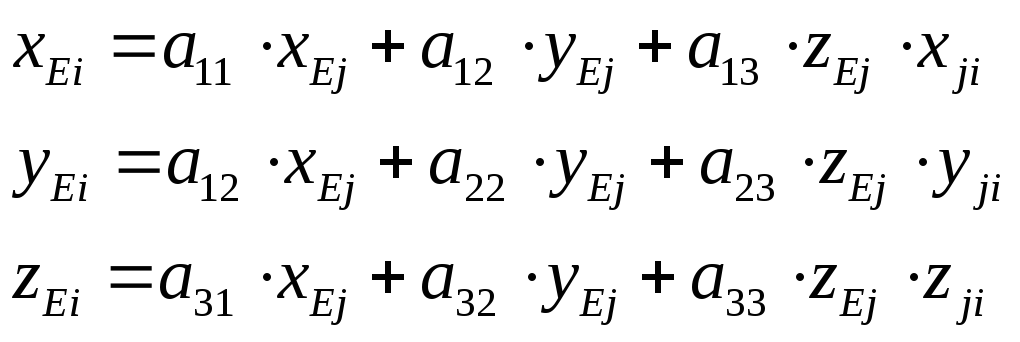 (2.15)
(2.15)
Системе
(2.15)
при
добавлении тождества
![]() адекватно матричное уравнение вида
адекватно матричное уравнение вида
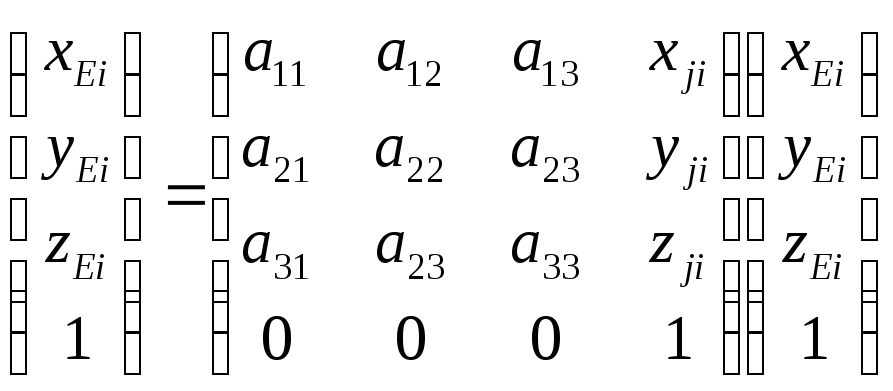 (2.16)
(2.16)
или
![]()
Коэффициенты
![]() ,
входящие в выражение матрицы Mji
представляют собой направляющие косинусы
углов, образованных осями координат
системы Si
с осями системы
,
входящие в выражение матрицы Mji
представляют собой направляющие косинусы
углов, образованных осями координат
системы Si
с осями системы
![]() .
Выражения
для
.
Выражения
для
![]() приведены в справочниках по математике.
Для пространственной кинематической
цепи матрицы, определяющие вращение
звена j
относительно координатных осей X,
Y,
Z
и перемещение вдоль них,
имеют вид:
приведены в справочниках по математике.
Для пространственной кинематической
цепи матрицы, определяющие вращение
звена j
относительно координатных осей X,
Y,
Z
и перемещение вдоль них,
имеют вид:
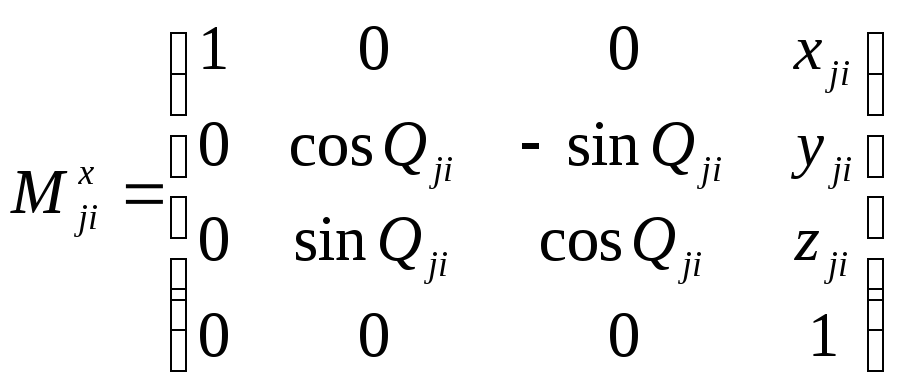 (2.17)
(2.17)
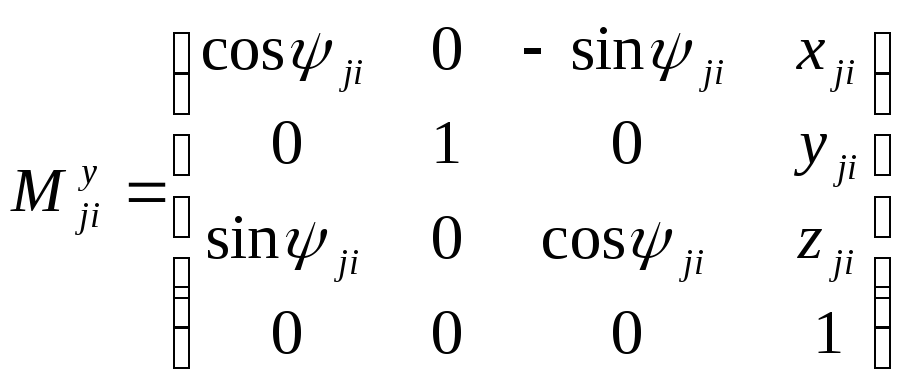 (2.18)
(2.18)
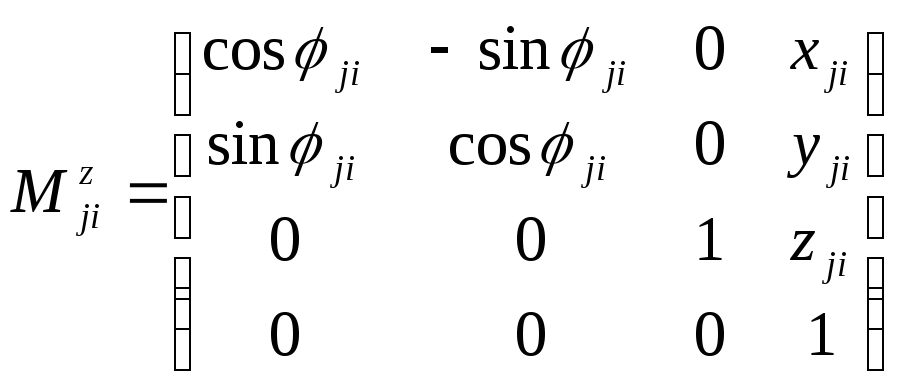 (2.19)
(2.19)
Из данных матриц можно определить матрицы конкретных кинематических пар. Для этого в выражения (2.17,2.18,2.19) необходимо подставить уравнения связи.
2.5.4 Уравнения преобразования координат для конкретных кинематических пар,
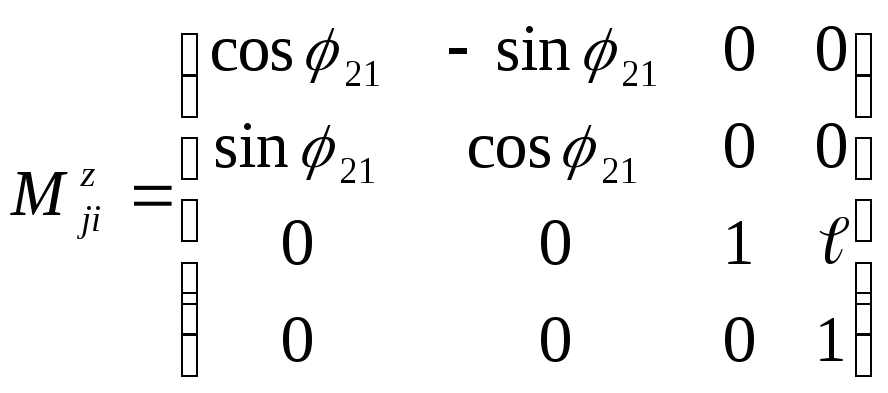
Рассмотрим примеры. Пусть имеется кинематическая пара 5 класса .Требуется определить положение некоторой точки в системе Si. Для данной кинематической пары:
![]()
С учетом этих уравнений
Положение точки Е в системе Si
![]() где
где
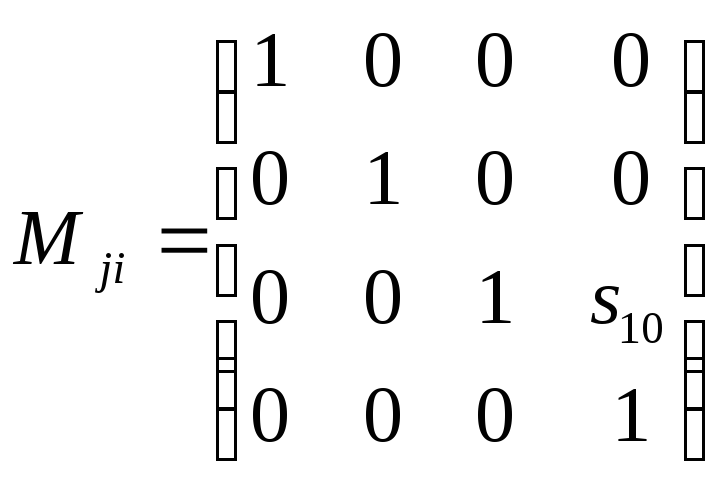
Для поступательной кинематической пары 5 класса / рис. 2. 15б/
![]()
С
учетом этих уравнений любая матрица
(2.17), (2.18), (2.19) дает одинаковое выражение
вида: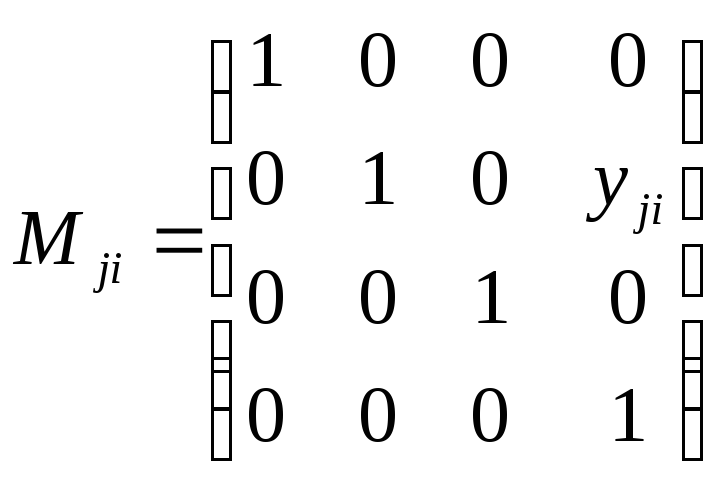
Т.
е. для
поступательной кинематической пары 5
класса ориентированной по любой из
координатных осей первые три столбца
матрицы
![]() одинаковы.
одинаковы.
Положение точки в системе Si:
![]() где
где
5. 5 Определение положения захвата пространственного манипулятора в неподвижной системе координат.
Полученные в предыдущем разделе выражения для матриц кинематических пар позволяют определить положения точек звеньев любых пространственных кинематических цепей.
В качестве примера рассмотрим механизм манипулятора имеющего четыре степени свободы: возвратно-поступательное движение звена в вертикальном направлении по направляющим стойки. возвратно-вращательное движение звена 2 относительно звена I в горизонтальной плоскости и возвратно-поступательное и вращательное движение звена 3 с захватом относительно звена 2 в горизонтальном направлении.
С каждым звеном свяжем систему координат следующим образом:
по
стойкой-системой
![]() так, чтобы ось
Z0
была направлена по оси поступательной
пары А со звеном 1-систему
так, чтобы ось
Z0
была направлена по оси поступательной
пары А со звеном 1-систему
![]() так, чтобы
ось Z1
была направлена по оси вращательной
пары со звеном 2 - систему
так, чтобы
ось Z1
была направлена по оси вращательной
пары со звеном 2 - систему
![]() так, чтобы ось -X2
была направлена по оси поступательной
пары С, а со звеном 3-систему
так, чтобы ось -X2
была направлена по оси поступательной
пары С, а со звеном 3-систему
![]() оси которой параллельны осям системыS2.
оси которой параллельны осям системыS2.
Запишем матричные преобразования координат точки E звена 3 от системы S3 к системе S0.
![]() (2.20)
(2.20)
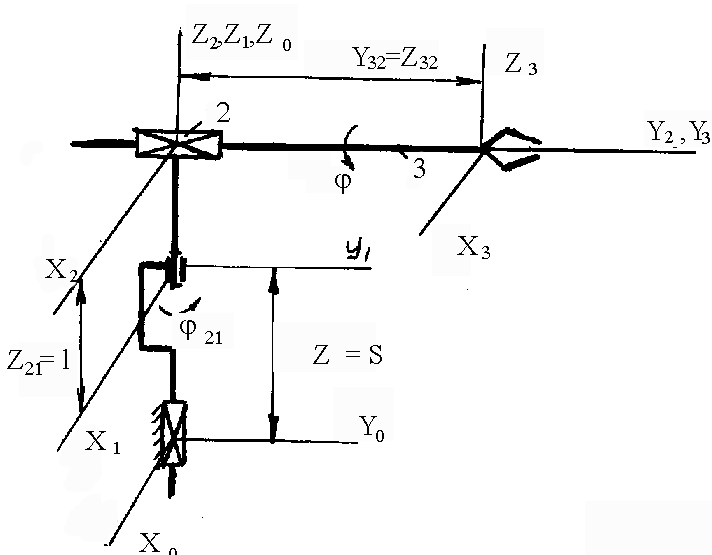
Рис. 2.14 Схема пространственного манипулятора имеющего четыре степени свободы
Для кинематической пары, состоящей из звеньев 2 и 3 уравнения
связи
![]()
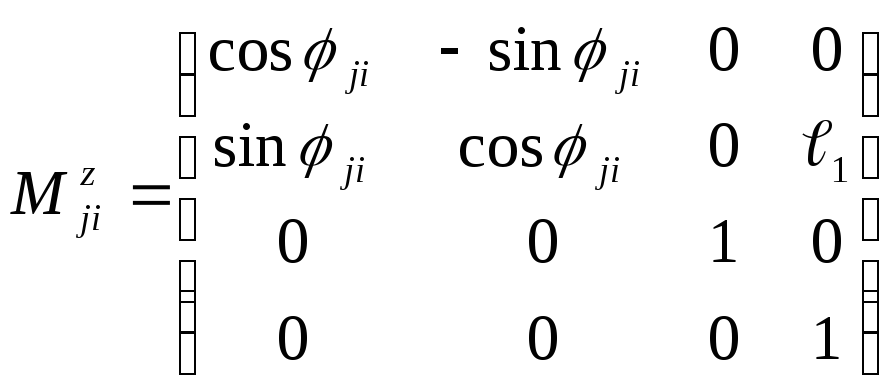
Подставляя эти уравнения в выражение (2.18) ,а затем в (2.21) после преобразования получим
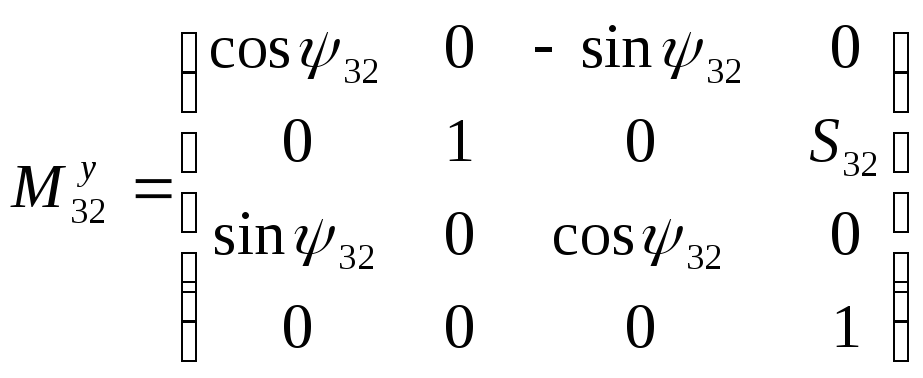 (2.21)
(2.21)
Для кинематической пары из звеньев 2 и 1
![]()
 (2.22)
(2.22)
Для кинематической пары из звеньев 1 и 0
![]()
 (2.23)
(2.23)
После подстановки выражений (2.21), (2.22), (2.23) в ( .2.20 ) и применения матриц можно определить координаты точки Е захвата в неподвижной системе S0.
Параметры
![]() -
переменные и задаются устройством
управления манипулятора. Все другие
параметры, в том числе и геометрические
размера определяются конструкцией.
-
переменные и задаются устройством
управления манипулятора. Все другие
параметры, в том числе и геометрические
размера определяются конструкцией.