

Лекция 24.
План лекции.
6.4. Кинематический анализ кулачковых механизмов.
6.5. Синтез кулачковых механизмов
6.6. Проектирование по кинематическим параметрам. Построение профиля кулачка при поступательном движении толкателя.
6.7. Проектирование по динамическим параметрам.
6.8. Силы, действующие в кулачковом механизме. Явление заклинивания. Критический угол давления.
6.4. Кинематический анализ кулачковых механизмов.
Основная задача кинематического исследования кулачкового механизма заключается в определении перемещений, скоростей и ускорений ведомого звена по заданным размерам механизма, профилю кулачка и закону его движения. Решение этой задачи может быть выполнено следующими методами:
1) аналитическим, (для чего необходимо иметь уравнение кривой профиля),
2) графическим, (метод нахождения последовательных положений ведомого звена с последующим построением кинем.диаграмм),
3) методом построения планов скоростей и ускорений,
4) методом замены высших пар низшими.
Воспользуемся вторым методом. На рис. 6.IIа изображен аксиальный кулачковый механизм.
Р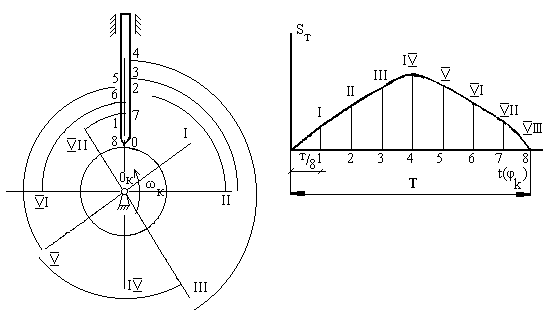 ис.6.IIа,б.
Анализ аксиального кулачкового механизма.
ис.6.IIа,б.
Анализ аксиального кулачкового механизма.
Поворачивая
кулачок на равные углы, находим положения
толкателя. Строим график S1=f(t)(рис
.6.IIб)
или S=f1(![]() ).
Затем методами графического
дифференцирования строим графики
V=f2(t)
и a=f3(t).
).
Затем методами графического
дифференцирования строим графики
V=f2(t)
и a=f3(t).
6.5 Синтез кулачковых механизмов.
В зависимости от задач, поставленных при проектировании кулачкового механизма, применяются два основных метода:
1. Проектирование по кинематическим параметрам.
2. Проектирование по динамическим параметрам.
В первом случае минимальным радиусом кулачка задаются; во втором - его определяют, исходя из динамических условий работы кулачкового механизма.
6.6 Проектирование по кинематическим параметрам. Построение профиля кулачка при поступательном движении толкателя.
Чтобы спроектировать профиль кулачка кулачкового механизма необходимо иметь:
1) Кинематическую схему механизма (вид кулачкового механизма).
2)
Закон движения ведомого звена в функции
ведущего S(![]() )
или
)
или
![]() (
(![]() )
(рис.6.11)
)
(рис.6.11)
3) Основные размеры: r0 - радиус основной шайбы кулачка; e-величина эксцентриситета кулачка.
4) Направление угловой скорости вращения кулачка
Будем
строить профиль кулачка при поступательном
движении толкателя. Пусть закон движения
S(![]() )
задан графически и имеет
4 фазы.
Масштабные коэффициенты построения
)
задан графически и имеет
4 фазы.
Масштабные коэффициенты построения
![]() s
,
s
,
![]()
![]() .
.
Р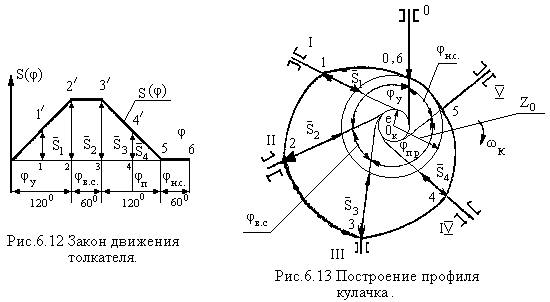 азобьем
фазу удаления и фазу приближения на
несколько равных интервалов (рис.
6. II) и в
каждый момент времени определим
ординату, изображающую в масштабе
перемещение толкателя.
азобьем
фазу удаления и фазу приближения на
несколько равных интервалов (рис.
6. II) и в
каждый момент времени определим
ординату, изображающую в масштабе
перемещение толкателя.
На чертеже отметим центр вращения кулачка Ok, проведем окружности радиусом основной шайбы r0 и радиусом e , покажем направление движения толкателя (6.12).
6.4 Проектирование по динамическим параметрам. Определение текущих углов давления. Аналог скорости
толкателя.
Угол давления и угол передачи связаны с геометрическими параметрами кулачка определенными соотношениями. Определим эти соотношения, для чего рассмотрим кулачковый механизм с поступательным толкателем (рис.6.16). Обозначим:
![]() -
текущий радиус профиля;
-
текущий радиус профиля;
 Vk1
- скорость
точки К
, принадлежащий кулачку;
Vk1
- скорость
точки К
, принадлежащий кулачку;

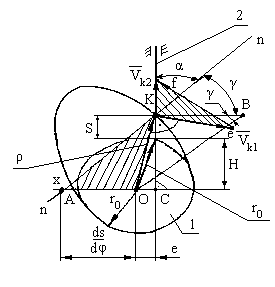 Vk2
- скорость
точки К , принадлежащей толкателю.
Рис.6.16 К определению
угла давления.
Vk2
- скорость
точки К , принадлежащей толкателю.
Рис.6.16 К определению
угла давления.
Из
рис.6.16
следует, что:
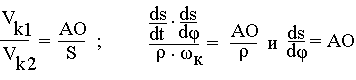 Vk2
= Vk1
+
Vk2
k1
,
Vk2
= Vk1
+
Vk2
k1
,![]() kfe
пропорционален
kfe
пропорционален
![]() AKO,
откуда
AKO,
откуда
В еличинаds/dt
является аналогом скорости толкателя.Аналог
скорости перепендикулярен скорости
толкателя и зависит только от закона
движения. S=f(
еличинаds/dt
является аналогом скорости толкателя.Аналог
скорости перепендикулярен скорости
толкателя и зависит только от закона
движения. S=f(![]() k).
Из
k).
Из
![]() AKC
AKC
 Эксцентриситет
может быть отложен и вправо и влево от
оси кулачка. Общий вид формулы для
определения угла давления:
Эксцентриситет
может быть отложен и вправо и влево от
оси кулачка. Общий вид формулы для
определения угла давления:
Из полученной формулы можно сделать следующие выводы:
а)
Угол давления
![]() зависит от величины и расположения
эксцентриситета
e.
зависит от величины и расположения
эксцентриситета
e.
б)
С увеличением r0
угол![]() уменьшается.
уменьшается.
в) Увеличение угла давления ведет к увеличению и скорости толкателя Vk2, что улучшает кинематические условия, т.е условия воспроизведения заданного закона движения, но ухудшает динамические условия.
Если через ось вращения кулачка провести линию, параллельную нормали nn, а через конец толкателя провести линию, параллельную х до перенесения их в точке В, то имея в виду, что ВК=АО, получим:
BK=AO=ds/d![]()
Угол
КВО
равен углу передачи
![]() =900-
=900-![]() ,
величина которого остается неизменной
независимо от положения центра
О
на линии ВО,
которая является геометрическим местом
возможных положений оси вращения
кулачка. На этой линии ось вращения
кулачка можно наметить в любом месте.
Таким образом, при заданных d1S
и ds/d
,
величина которого остается неизменной
независимо от положения центра
О
на линии ВО,
которая является геометрическим местом
возможных положений оси вращения
кулачка. На этой линии ось вращения
кулачка можно наметить в любом месте.
Таким образом, при заданных d1S
и ds/d![]() построение
геометрического места возможных
положений оси вращения кулачка для
выбранного положения толкателя
сводится к проведению луча из конца
отложенного отрезка ВК=ds/d
построение
геометрического места возможных
положений оси вращения кулачка для
выбранного положения толкателя
сводится к проведению луча из конца
отложенного отрезка ВК=ds/d![]() и под заданным углом
и под заданным углом
![]() .
.