

9.1.3. Следящий привод.
Принцип
действия следящего привода поясним на
примере гидрокопировального устройства
фрезерного станка, рис.
9.2. Фреза 4 соединена
с корпусом гидроцилиндра, а щуп
2 - со штоком
гидрозолотника. Гидроцилиндр называется
исполнительной
частью, а
гидрозолотник управляющей (иногда
- задающей).
Обе части вместе с насосом
5 установлены
на общем столе б, который вместе с
ползуном
1 может
перемещаться в направлении задающей
подачи S3.
При этом
перемещении щуп
2 получает
следящую подачу, зависящую от профиля
копира
3, а фреза
4 вместе
со столом б повторяет движение щупа,
"следит" за его движением
( отсюда
название
- с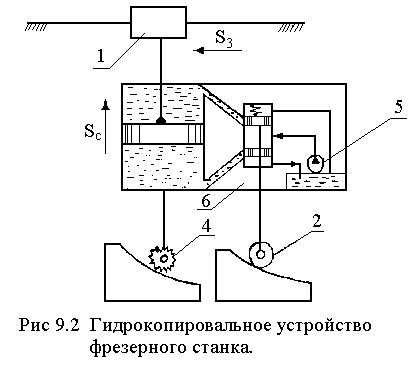 ледящий
привод).
ледящий
привод).
Процесс слежения можно представить себе следующим образом: если щуп и фреза занимают одинаковые положения по отношению к копиру и заготовке, то шток занимает среднее положение, перекрывая оба трубопровода, ведущие к гидроцилиндру. При движении штока золотника из среднего положения вверх жидкость под давлением поступает в верхнюю полость гидроцилиндра и его корпус вместе со столом б и фрезой 4 также перемещается вверх так как поршень гидроцилиндра жестко соединен с ползуном 1. Движение корпуса гидроцилиндра относительно поршня и, следовательно, движение стола б относительно штока золотника продолжаются до тех пор, пока шток золотника не займет опять среднее положение. Если по инерции среднее положение будет пройдено, то жидкость под давлением поступит в нижнюю полость гидроцилиндра и начнется обратное движение к среднему положению.
Из приведенного описания процесса слежения видно, что движение инструмента 4 всегда отстает от движения щупа 2 и, кроме того, возможно возникновение колебаний при переходе через среднее положение. Эти погрешности движения инструмента могут быть сведены к минимуму путем надлежащего выбора параметров гидроцилиндра и золотника на основании общих методов динамического синтеза механизмов.
По сравнению со способом непосредственного копирования применение следящего привода имеет то достоинство, что на копир передается лишь небольшое давление пружины золотника, а усилие резания, иногда очень значительное, передается через гидроцилиндр непосредственно на стойку.
Кроме управления от копиров и следящего привода применяются также:
числовое программное управление;
самонастраивающиеся системы управления;
системы управления по времени (пути);
системы управления с записью и автоматическим воспроизведением программы.
В
машинах-автоматах с числовым программным
управлением информация о
величине требуемых перемещений
исполнительных органов сообщается
системе управления в виде чисел,
называемых информационными числами.
Если величина требуемого перемещения
равна S,
то информационное число
(число
шагов) должно быть ближайшим целым
числом к отношению z
=S
/
![]() S
где
S
где
![]() S-величина
единичного перемещения
(шага),
выбираемая в зависимости от требуемой
точности перемещений. Обеспечивает
шаговым двигателем.
S-величина
единичного перемещения
(шага),
выбираемая в зависимости от требуемой
точности перемещений. Обеспечивает
шаговым двигателем.
Для фиксации программы, выраженной в числах, используются различные программоносители: магнитные ленты, киноленты, перфокарты, перфоленты, панели управления с переключателями. На перфолентах фиксируются числа в десятичном или двоичном коде путем прокалывания отверстия в определенных местах. Для считывания числа с перфоленты применяются как контактные, так и бесконтактные способы.
При контактных способах щупы или щетки западают в отверстия и замыкают соответствующие контакты. При бесконтактных способах используются фотосопротивления или пневматические датчики.
С целью повышения производительности машины-автоматы и для достижения большей точности выполнения заданных условий в последнее время стали создавать системы управления, в которых программа, путем введения блока сравнения, корректируется с учетом результатов выполнения технологического процесса. Эти системы получили название самонастраивающихся.
Система управления машины-автомата, обеспечивающая требуемую согласованность перемещений исполнительных органов в зависимости от времени, называется системой управления по времени.
Программа для системы управления по времени задается в виде циклограмм. Циклограммой машины-автомата называется схема согласованности перемещений исполнительных органов в зависимости от времени. Управление по времени наиболее просто достигается кулачковыми механизмами с одним общим валом для всех кулачков, который называется кулачковым распределительным валом. При управлении с помощью кулачкового распределительного вала исполнительные органы приводятся в движение не посредственно от кулачков, т.е. система управления совмещена с механизмами передачи движения к исполнительным органам. Если надо уменьшить нагрузки на кулачки, то каждый исполнительный орган получает индивидуальный электро или гидропривод, а система управления выделяется в отдельное устройство, называемое кулачковым командоаппаратом. При управлении по времени кулачковый командоаппарат состоит из равномерно вращающегося вала с регулируемыми кулачками, которые через определенные промежутки времени нажимают на переключатели, вызывающие включение того или иного привода.
Системы управления с записью и автоматическим воспроизведением программы включают равномерно движущийся программоноситель в виде магнитной ленты. Это позволяет записывать программу обработки изделия при ручном управлении и затем многократно воспроизводить её в автоматическом режиме. Принцип записи и воспроизведения аналогичен принципу, применяемому в магнитофонах.
Лекция 34
План лекции: