

3.6.1 Кпд поступательной кинематической пары.
Рассмотрим поступательную кинематическую пару (рис.3.24).
На звено I под углом действует сила Q.Разложим эту силу на составляющие FN и F
При наличии трения в паре мгновенный КПД определится как
=1-=1-(Pв.с/ Pg) (3.24)
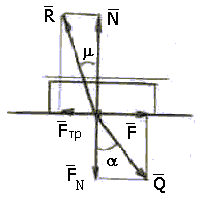
Рис.3.24 К определению КПД
поступательной пары
При установившемся движении
Pв.с = Pтр
Pв.с=Fт.р·V=N·f·V=Q·cos·f·V
Pg=Fg·V=Q·sin·V
Подставим последние выражения в формулу (3.24)
=1-(Q·cos·f·V/ Q·sin·V)=1-ctg·f
т.к. f=tg ,то =1-ctg·tg (3.25)
В режиме самоторможения или заклинивания , =0 , т.е. сила Q проходит по образующей или внутри конуса трения.
3.6.2 КПД вращательной кинематической пары.
В соответствии с рис. 3.25 Mg=Q·r· cosи Mт.р=N·
тогда =1- =1- Pтр/Pg
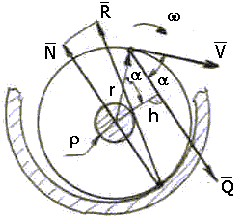
Рис.3.25 К определению КПД из условия равновесия
вращательной пары. N=Q , = 1-/h (3.26)
где h=r·cos
ПриI , т.е. когда =h наступает самоторможение. В этом случае сила проходит по касательной к кругу трения.
3.6.3. Определение кпд механизма.
Рассмотрим приближенный способ определения КПД механизмов на примере четырехзвенного кривошипно-шатунного механизма(рис.3.26)
Известны: геометрические параметры звеньев, коэффициенты трения в кинематических парах, закон движения, приложенные силы, мощность
движущих сил.
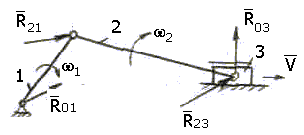
Рис. 3. 26
К определению КПД механизма
Проведем кинематический анализ и определим относительные скорости всех звеньев V30=VB
10=1 , 12=1+2 , 23=2
Методом кинетостатики определим реакции в кинематических парах без учета сил трения.
Затем определим мощность, затраченную на преодоление сил трения в кинематических парах.
Pтpо=Мтр0·W10=R01·fцо·rцо·10
PтpA=R12·fЦА·rЦА·12
PтpB=R23·fЦB·rЦB· 2
Pтpп=R03·fЦ·VB (3.27)
Pтp=Pтpо+PтpA+Pтpв+Pтpп , Pс.п=Pтp
h =Pп.с/Pg
Этот метод является приближенным потому, что реакции найдены без учета сил трения.
Если требуется более высокая точность, то пользуются методом последовательных приближений.
1. Определяются реакции без учета сил трения.
2. По найденным реакциям находятся силы трения в кинематических парах.
3. Уточняется реакции с учетом сил трения.
3.6.4 Кпд соединенных машин.
Рабочие машины и механизмы в большинстве случаев соединяются в группы. Поэтому появляется необходимость определения КПД целой группы механизмов. По способу использования поступающей энергии отдельные механизмы в группе могу соединяться последовательно, параллельно и смешанно.
1)При последовательном соединении механизмов (рис.3.27) работа или мощность, подводимая к первому механизму, последовательно проходит через все механизмы, теряя некоторую часть на каждом из них.
КПД сложного механизма при последовательном соединении равен
=An/А
КПД частных механизмов равен
1=A1/АА2/A1 , n=An/An-1
Перемножим все КПД отдельных механизмов.·
1·nA1/А·А2/A1 An/An-1= An/А=
или 1· n (3.28)
Таким образом, при последовательном соединении механизмов КПД <равен произведению КПД отдельных механизмов. Так как все отдельные КПД меньше единицы ( 1<1 2<1 n <1), то общий КПД всегда меньше I и меньше каждого из частных.
2) При параллельном соединении механизмов (рис.3.28) , подводимая ко всему сложному механизму работа А распределяется по отдельным механизмам в количествах к1· Аg к2· Аg к3· Аg
кn· Аg , которые являются для каждого механизма движущими.
где к1 , к2 кn - коэффициенты распределения энергии
Аg = к1· Аg к2· Аg кn· Аg
откуда к1 к2 кn=1
Для всех механизмов группы можно записать соотношения между работами сил полезного сопротивления и движущих сил ,
Ап.с1= к1·1·Аg , Ап.с2= к2·2·Аg , Ап.сn= кn·n·Аg
КПД всей группы является отношение суммы работ сил полезного сопротивления всех механизмов к сумме работ движущих сил
( Ап.с1 Ап.с2 Ап.сn) / Аg
и окончательно к1·1 к2·2 кn·n (3.29)
КПД параллельно соединенных машин равно сумме произведений КПД отдельных машин на коэффициенты распределенной нагрузки.
Для повышения общего КПД выгодно большие порции энергии пропускать через машины с большим КПД, и наоборот, через машины с малым КПД пропускать небольшие порции энергии.
3) При смешанном соединении машин нужно выделить группы с последовательным и группы с параллельным соединением и для каждой из них определить КПД по соответствующим формулам, а затем рассмотреть объединение этих групп как отдельных механизмов.

Рис.3.27 Последовательное соединение машин.
Р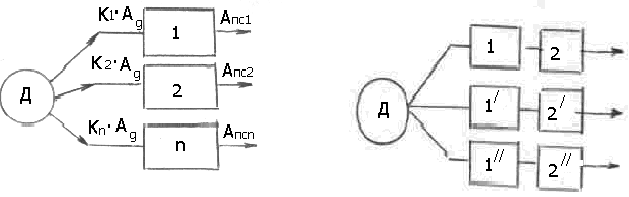 ис.3.28
Параллельное соединение Рис.3.29
Смешанное соединение машин
ис.3.28
Параллельное соединение Рис.3.29
Смешанное соединение машин