

Лекция 25
План лекции.
6.9. Графический метод определения основных размеров кулачкового механизма по заданному допускаемому углу давления.
6.10. Графическое определение текущих углов давления.
6.11. Аналитический метод определения основных размеров кулачкового механизма по заданному допускаемое углу давления.
6.12. Силовой расчет кулачкового механизма.
6.9. Графический метод определения основных размеров кулачкового механизма по заданному допускаемому углу давления.
Сущность метода сводится к определению оси вращения кулачка на луче, дающем геометрическое место его возможных положений, определяемых допускаемым углом давления.
Будем исходить из заданной диаграммы аналога скорости толкателя (рис. 6.17). Интегрирование заданной функции ds/d дает возможность построить диаграмму s(). Используя эти две диаграммы, исключая общий аргумент строим диаграмму ds/ds) (рис. 6.17). Чтобы определить направление отрезка ds/d точек 1,2,3 и т.д. на оси ds/d воспользуемся следующим правилом. Если ds/d,то масштабные значения аналогов откладываются вправо от оси s, если ds/d, то влево. Под заданным (допустимым) углом давления к отрезкам ds/d проводятся лучи. Каждый луч определяет геометрическое место осей вращения кулачка, обеспечивающих заданный угол доп только для своего положения механизма.
Чтобы угол i за полный оборот кулачка не превысил допустимого ( необходимо ось вращения кулачка расположить в зоне, лежащей между крайними лучами. Кулачок будет иметь минимальные габариты в том случае, если его ось вращения расположить в точке 0 пересечения крайних лучей.
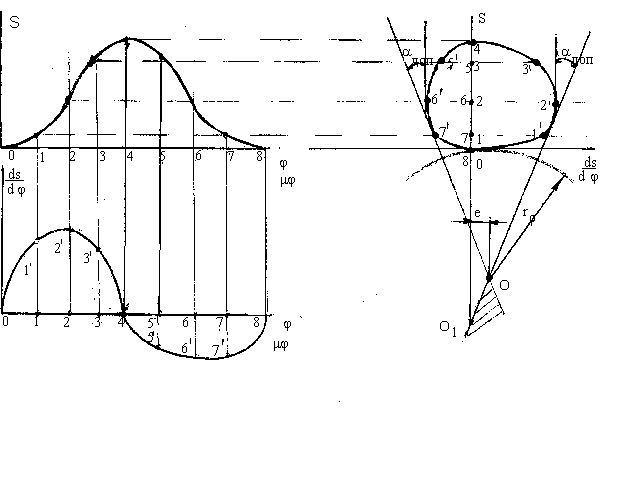
Рис.6.17. Определение минимального радиуса кулачкового механизма с поступательным толкателем.
Если увеличить минимальный радиус кулачка, поместив ось вращения кулачка в точку О1 то получим центральный кулачковый механизм ( е = 0). Удаление оси вращения кулачка от точки 0 в заштрихованную зону, приводит к улучшению динамических условий работы механизма, за счет уменьшения углов давления, но при этом возрастают габариты кулачка.
Графическое определение минимального радиуса кулачка для механизмов с коромысловым толкателем аналогично.
При заданном законе изменения аналога угловой скорости толкателя ddинтегрированием поучим график (рис. 6.18). Исключая из графиков dd и параметр построим диаграмму dd . При известной длине толкателя lт, на лучах, соединяющих ось вращения толкателя и обозначенные на диаграмме точки 1,2,3 и т.д., отложим аналоги угловой, скорости did . Значения did откладывают от оси вращения коромысла (точки С), если угловые скорости кулачка к и толкателя т направлены в разные стороны, и к центру С , если к и т направлены в одну сторону.
Для каждого положения толкателя из конца отрезков диаграммы под углом min= 900- доп проводим лучи, представляющие собой геометрическое место возможных осей вращения кулачка для этого положения. Условие доп будет выполнено, если центр вращения кулачка не будет выходить из заштрихованной зоны, ограниченной крайними лучами.
Минимальный радиус кулачка будет в случае, если ось вращения кулачка поместить в точку пересечения крайних лучей (точка 0). Отрезок ОС представляет собой межосевое расстояние кулачка и толкателя.