

7.5 Элементы и свойства эвольвентного зацепления
1. На pnc.7.5 изображено внешнее зацепление двух эвольвент. Проведем общую нормаль к эвольвентам в точке их контакта k. По свойству эвольвенты она должна быть касателъной к каждой из основных окружностей. Следовательно, она может занять единственное положение общей касательной к двум окружностям. При вращении звеньев т. k будет менять свое положение, но общая нормаль по той же причине всегда будет совпадать с общей касательной NN. Но так как она касается одних и тех же окружностей, то ее положение неизменно и она пересекает межосевую линию в постоянной точке Р. Следовательно; передаточное отношение эвольвентой передачи постоянно: U12=const
2. Эвольвентное зацепление допускает некоторое изменение межосевого расстояния с сохранением ранее предусмотренного передаточного отношения. Действительно (см.рис. 7.5):
![]()
т.к.- радиусы основных окружностей неизменны.
3. Эвольвентные профили являются сопряженными только в пределах отрезка N1N2 линии зацепления. Действительно, за т. N2 эвольвенты не имеют общей касательной, а пересекаются. Это вызовет заклинивание передачи.
Картина эвольвентного зацепления (рис.7.6)
По известному передаточному отношению и модулю определяются все размеры передачи. Затем проводится линия центров, откладывается межосевое расстояние a=r1+r2 и отмечаются центры O1 и O2. Проводятся все окружности; через полюс Р - касательная к начальным окружностям и линия зацепления (под углом =20 ). На основных окружностях строятся эвольвенты. Вычисляется толщина зуба и ширина впадин и откладываются по начальным окружностям.
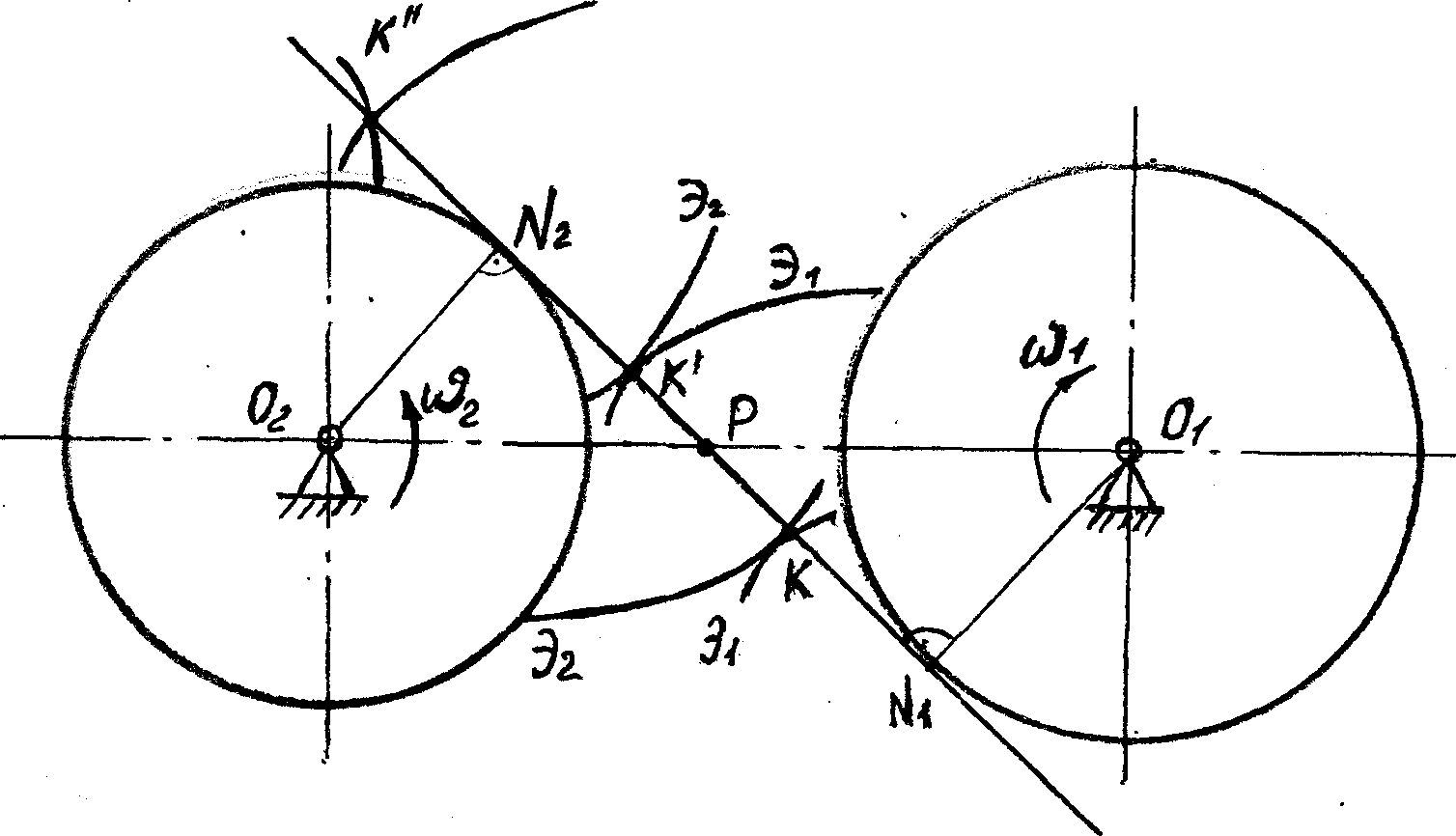
Рис.7.5. Свойства эвольвентного зацепления
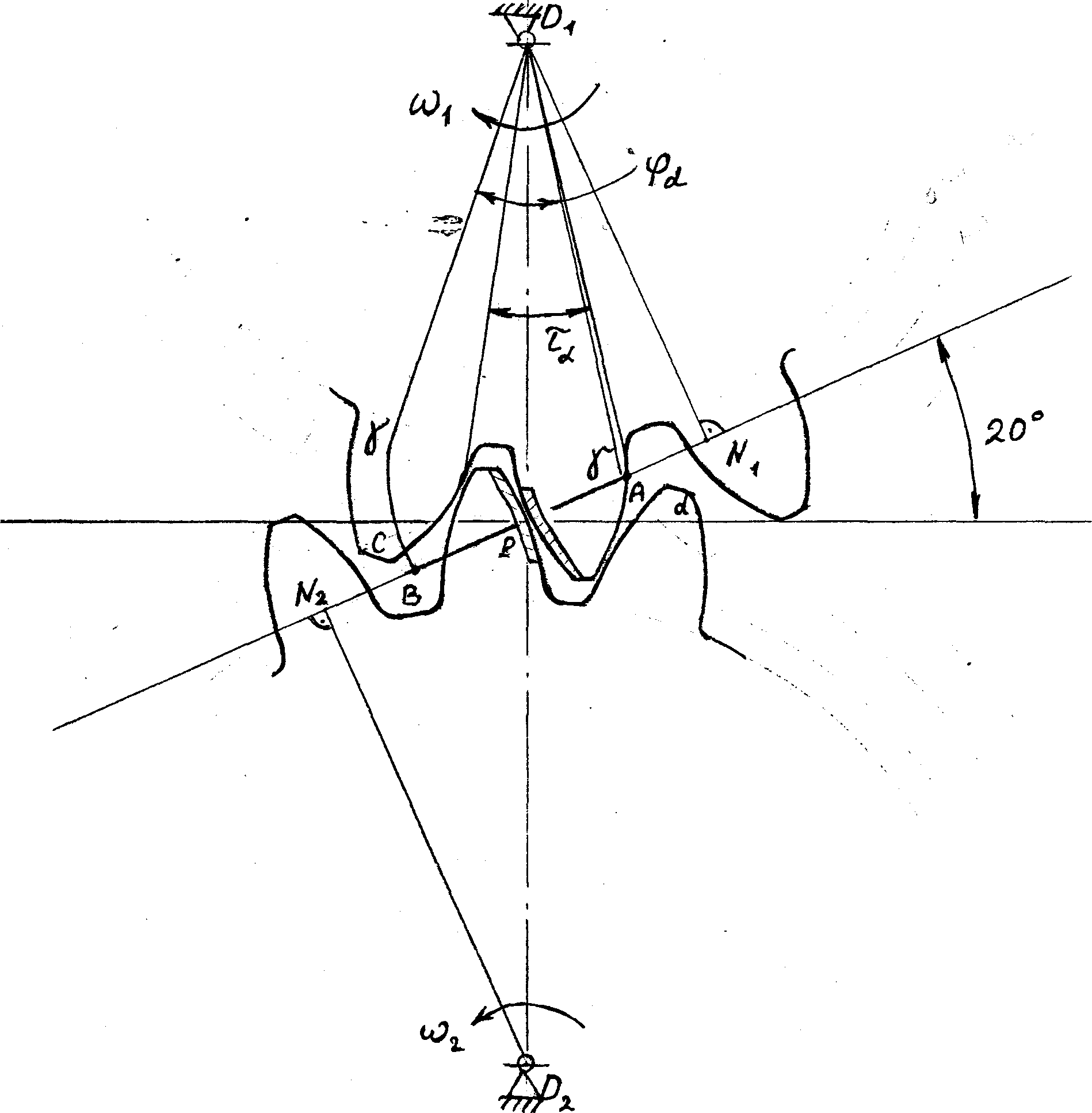
Рис.7.6. Картина эвольвентного зацепления
Через полученные точки проводят боковые профили зубьев. У основания они скругляются радиусом rск.
N1N2 - линия зацепления. Точка контакта зубьев движется вдоль неё. Вне этой линии зацепление невозможно.
Очевидно, что каждый зуб колеса находятся в зацеплении не на всем пути; в какой-то момент он входит в зацепление и в какой-то выходит. Пусть колесо 1 -ведущее, 2 - ведомое. Очевидно, что первой в зацепление вступит т. d зуба 2-го колеса. Но зубья могут касаться друг друга только на линии зацепления. Следовательно, первой точкой касания будет точка пересечения окружности вершин 2-го колеса с линией зацепления - т. А. Касание в дальнейшем будет происходить по линии зацепления.
Последней точкой в зацеплении будет точка С 1-го колеса. Поэтому последней точкой зацепления будет точка пересечения окружности вершин 1-го колеса с линией зацепления – т. В.
Участок АВ называется активной линией зацепления. Она должна укладываться в пределах N1N2. Если точка А или В выйдет за линию зацепления, в передаче произойдет заклинивание.
Рабочий участок профиля зуба 1 располагается от вершины зуба до точки пересечения профиля с окружностью, проведенной из O1 через т. А .
Соответственно, для 2-го колеса - из O2 через т. B .
7.6. Коэффициент перекрытия
При работе передачи необходимо, чтобы в любой момент времени зубья были в зацеплении, тогда работа будет безударной. Каждая последующая пара зубьев должна войти в зацепление еще до того, как предшествующая выйдет из зацепления.
Непрерывность и плавность работы учитывает коэффициент перекрытия.
Угол торцового перекрытия - это угол поворота колеса от положения входа зуба в зацепление до выхода его из зацепления.
Отношение угла торцового перекрытия зубчатого колеса к его угловому шагу называется коэффициентом перекрытия:
=/ (7.9)
Умножая числитель и знаменатель на r1 , получим
![]() (7.9,a)
(7.9,a)
где - дуга зацепления;
p- шаг по начальной окружности.
Рассмотрим момент выхода из зацепления 1-й пары зубьев (рис.7.7).
1. Если следующая пара в этот же момент входит в зацепление, то и =1.
2. Если эта пара еще не вошла в контакт, ведомое колесо 2 остановится и будет ждать, пока зуб первого колеса не достигнет второго. Здесь p=,<, и из(7.9,а) получаем <1. Такая передача будет работать с ударами.
3. Если вторая пара уже находится в зацеплении, то p= и >1.
Чем выше , тем плавнее работает передача. Этот коэффициент характеризует среднее число зубьев, находящееся в зацеплении. Для нормальной работы передачи необходимо >1,1
Выведем формулу для расчета коэффициента
![]() ,
откуда
,
откуда
![]() .
.
Но rb1=r1cos, следовательно, ’=’/cos.
Из геометрии имеем:
’=N1’-N1=N1A-N1B=AB
’=AB/cos
Дуга зацепления по начальной окружности равна активной линии зацепления, деленной на косинус угла зацепления. Тогда
![]()
Но AB=AP+PB.Из O1N1A и O1N1P имеем:
![]()
![]()
Окончательно
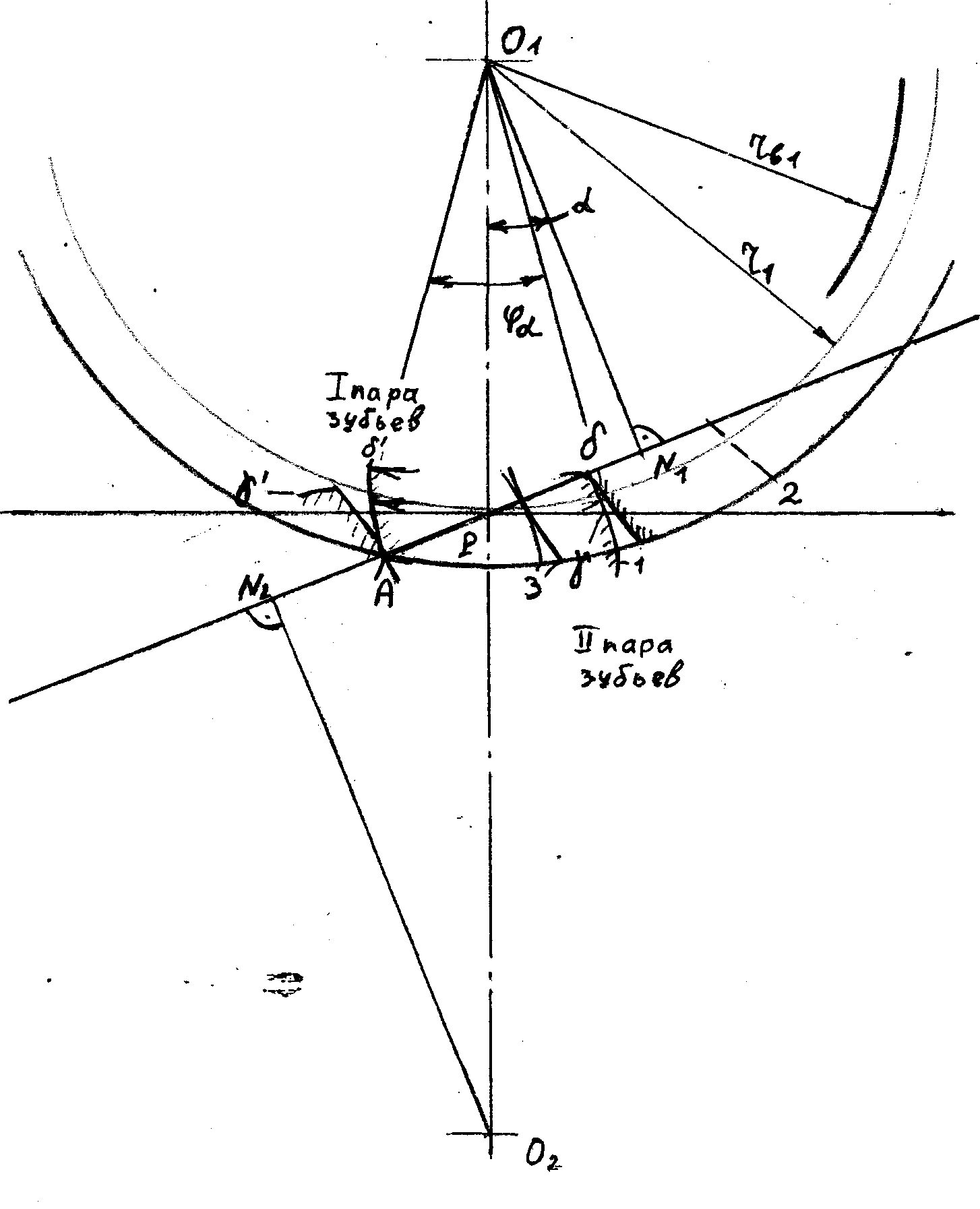
Рис. 7.7. К выводу формулы для коэффициента перекрытия

Рис.7.8. К условию отсутствия заклинивания
![]() (7.10)
(7.10)
где dw=r1+r2=rw1+rw2.
Формула (7.10) используется для проверки безударности работы. С увеличением чисел зубьев увеличивается. Максимальное значение =1,98