

Лекция 28.
План лекции
7.7. Интерференция зубьев. Условие отсутствия заклинивания
7.8. Внутреннее зацепление
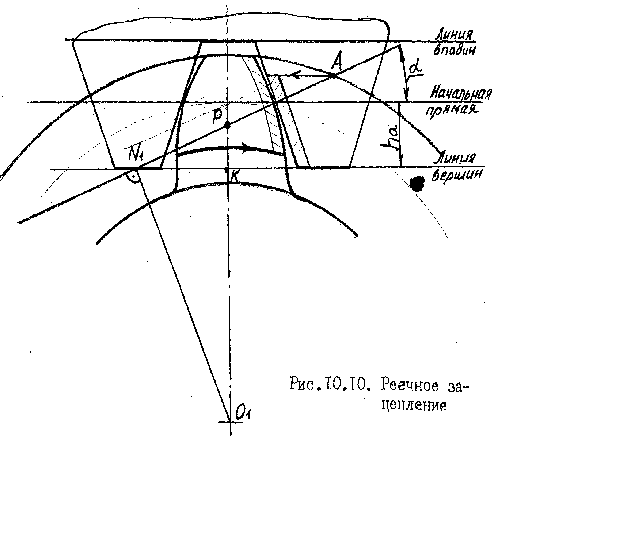
7.9. Реечное зацепление
Изготовление зубчатых колес.
7.7. Интерференция зубьев. Условие отсутствия заклинивания
Интерференция - это явление, состоящее в том, что при рассмотрении теоретической картины зубчатого зацепления часть пространства оказывается одновременно занятой двумя взаимодействующими зубьями.
Она наступает в том случае, если окружность головок большего колеса пересекает линию зацепления выше точки N1 (рис.7.8). Участок эвольвенты большого колеса не имеет сопряженного участка на профиле малого колеса,
Условие отсутствия заклинивания:
ra1O2N1
Из O2PN1
![]()
Но
![]()
Из
PO1N1
:
![]()
Учитывая
![]() , cos(90+)=-sin,
получим
, cos(90+)=-sin,
получим
![]()
![]()
Выразим z2 через передаточное отношение: z2=-U12z1
Тогда
![]()
Откуда
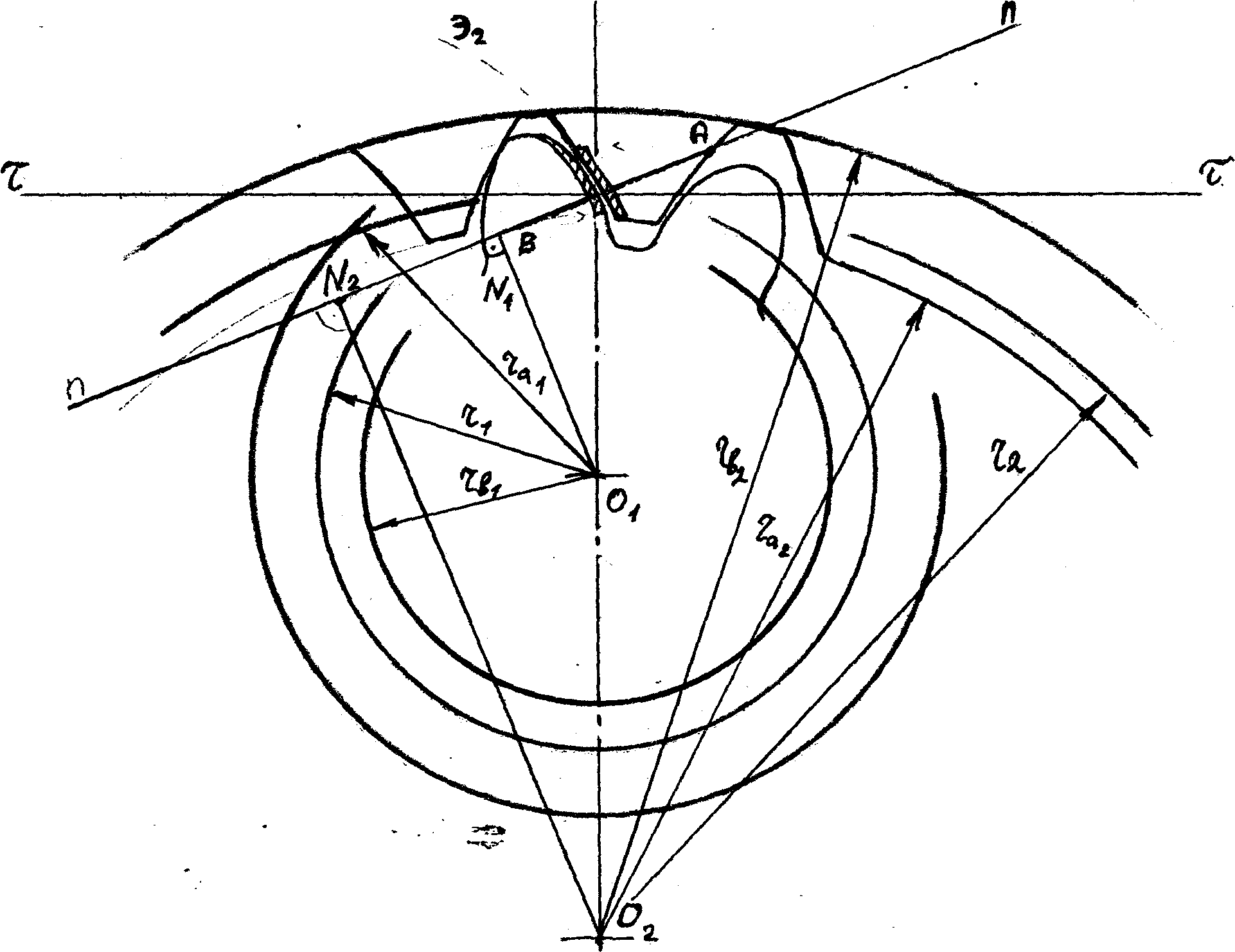
Рис. 7.9. Внутреннее зацепление

где zmin- минимально допустимое число зубьев малого колеса, при котором отсутствует заклинивание. Проверка на отсутствие заклинивания обязательно осуществляется после геометрических расчетов. При ha*=1 и =20
![]()
Так, при U12=-1 zmin=12, при U12=-2 zmin=14.
7.8. Внутреннее зацепление (рис.7.9)
Если начальная окружность малого колеса расположена внутри окружности большого колеса, то получается внутреннее зацепление, Полюc Р внешним образом делит межосевую линию на части, обратно пропорциональные угловым скоростям
![]()
Процесс взаимодействия профилей аналогичен внешнему зацеплению с той разницей, что выпуклый профиль малого колеса взаимодействует с вогнутым большого. Проводим центроиды, соприкасающиеся в полюсе P. Через полюс проводим касательную к окружностям - и образующую прямую n-n. Из центров O1 и O2 опускаем перпендикуляры на n-n и проводим основные окружности. Перекатывая прямую по основным окружностям, получаем эвольвенты Э1 иЭ2. Проводим окружности вершин и впадин малого колеса. Для большого колеса, имеющего зубья, расположенные на внутренней поверхности, формулы для определения радиусов окружностей вершин и впадин имеют вид
![]()
![]()
Активная линия зацепления АВ располагается между точками пересечения линии зацепления окружностями вершин колес. (Линия зацепления бесконечна от т.N1).
Рабочий участок профиля зуба 1 расположен от вершины до точки пересечения с боковым профилем окружности радиуса O1B, Рабочий участок 2-го зуба - от вершины до точки, определяемой радиусом O2A.
Если окружность вершин 2-го колеса пересекает линию зацепления левее т. N1, то рабочий участок его зуба простирается до точки пересечения профиля с окружностью, проведенной через т. N1 ).
Преимущества внутреннего зацепления:
Меньше скорость скольжения профилей:
Vск=PK(1-2)
PK-текучее значение от полюса P до точки контакта K.
Следовательно, меньше износ, выше КПД.
2. Выпуклый профиль малого колеса взаимодействует с вогнутым профилем. Поэтому удельное давление меньшее.
3. Компактность передачи.
4. Коэффициент перекрытия выше:
![]()
Недостатки:
1.Если окружность головок большого колеса будет пересекать участок N1N2 , то произойдет пересечение эвольвент - головка зуба одного колеса наложится на переходный участок зуба другого. Произойдет заклинивание передачи. Это явление носит название интерференции 1-го рода. Условие ее отсутствия:

Так, при U12>8 z1=18. (Наименьшее число зубьев малого колеса z1min= 17, при этом z2= - рейка).
2. При числе зубьев z1>26 не менее опасным становится явление, при котором головка зуба малого колеса внедряется в головку большого колеса. Это явление называется интерференцией 2~го рода. Условие ее отсутствия: z2-z1>9.
3.Консольное расположение осей, что снижает точность.
4. Сложность изготовления колес с внутренним зацеплением.