

3.8.5 Определение приведенных моментов инерции и моментов сил кривошипно – ползунного механизма.
На основании формул (3.46) и (3.49) для кривошипно – ползунного механизма развернутые выражения для определения приведенных: момента сил и момента инерции примут вид:
![]()
![]()
Где Mдв - момент движущих сил;
P3 - внешняя сила;
J1 - момент инерции ведущего звена.
Лекция 16.
План лекции.
3.8.6. Уравнения движения машины. Общие сведения.
3.8.7. Уравнения движения машины в форме интеграла энергии.
3.8.8. Уравнение движения машины в дифференциальной форме.
3.8.9. Анализ уравнений движения.
3.8.10. Решение уравнений движения машины аналитическим методом.
3.8.11. Неравномерность движения машины при установившемся режиме. Назначение маховика.
3.8.6. Уравнения движения машины. Общие сведения.
Для определения
закона движения машины нужно решить
уравнение его движения. Уравнения
движения могут быть представлены в
различных формах: ![]()
- если внешние силы являются функциями положения , то пользуются формой интеграла энергии.
- если внешние силы являются функцией не только положения, но и других параметров (скорости, времени…), то пользуются дифференциальной формой уравнения.
3.8.7. Уравнения движения машины в форме
интеграла энергии.
Уравнения в этой форме записываются на основании теоремы об изменении кинетической энергии.
Согласно этой теореме, изменение кинетической энергии за какой-то промежуток времени равно работе внешних сил за тот же промежуток времени, т.е.
К – Кнач = Aд – Ac = A , (3.50)
где Aд - работа движущих сил
Ac - работа сил сопротивления
Если все силы, моменты сил и массы привести к точке ведения, то уравнение (3.50) запишется так:
![]()
![]()
![]() (3.51)
(3.51)
где mnpi, mnp.нач. - приведенная масса в текущем и начальном
положениях механизма;
Fnpi, Fnp.c - приведенные движущие силы и силы сопротивления
S - перемещение точки, приведения.
Выражение (3.51) представляет собой уравнение машины в форме интеграла энергии (энергетической форме).
Если все силы и массы привести не к точке приведения, а к звену приведения, то это звено имеет переменный приведенный момент инерции Jпр. и нагружено суммарным переменным приведенным моментом Мпр., заменяющим силы и моменты, тактически действующие на механизм.
В этом случае уравнение движения в форме интеграла энергии примет вид:
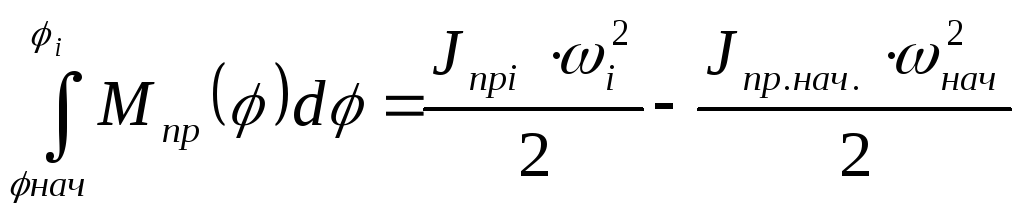 (3.52)
(3.52)
где - обобщенная координата
Левая
часть уравнения (3.52) представляет собой
работу приведенного момента сил на угле
![]() Правая часть уравнения - это разность
кинетической энергии модели в начале
и в конце пути.
Правая часть уравнения - это разность
кинетической энергии модели в начале
и в конце пути.
3.8.8 Уравнения движения в дифференциальной форме.
Этой формой уравнения пользуются, когда заданы внешние силы не только от положения, но и от скорости.
В соответствии с законом изменения кинетической энергии дифференциал dK кинетической энергии массы равен элементарной работеdAприложенных к ней сил.
dK = dA (3.53)
Так как после приведения сиди масс к звену приведения
![]() ,
,
![]() ,
,
то в дифференциальной форме уравнение (3.53) можно написать как:
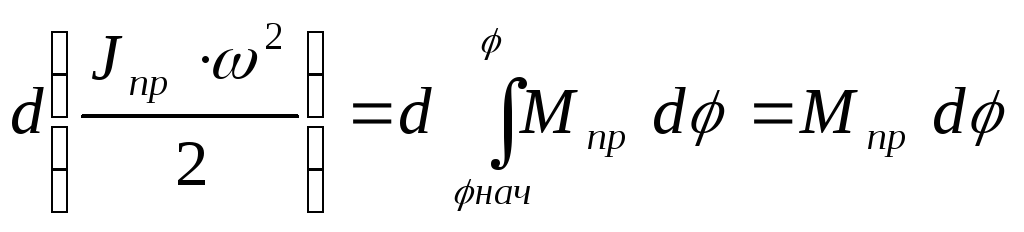 (3.54)
(3.54)
или
![]() (3.55)
(3.55)
С
учетом того, что
![]() ,
уравнение (3.55) дифференцируют как функцию
двух независимых переменных
,
уравнение (3.55) дифференцируют как функцию
двух независимых переменных![]() .
.
![]() (3.56)
(3.56)
Производная сложной функции:
тогда
![]() ,
,
![]() (3.57)
(3.57)
3.8.9 Анализ уравнений движения.