7.2. Основная теорема зацепления. Полюс зацепления. Центроиды колес.
Основная теорема зацепления устанавливает связь между геометрией сопряженных поверхностей зубьев и заданным законом их относительного движения, т.е. определяет условия, которым должны удовлетворять боковые профили зубьев для того, чтобы они могли обеспечить передачу вращения с одного вала на другой с заданными угловыми скоростями.
Пусть передача вращения между валами O1 и О2 осуществляется с угловыми скоростями 1 и 2 посредством двух взаимноогибаемых кривых 1 и 2 (рис. 7.2). К - точка контакта. Скорости точек K1 и К2 различны по величине и направлению:
Vk1= 11; Vk1O1K;
Vk2= 22; Vk2O2K;
где i - радиус кривизны.
Для правильного контакта зубьев необходимо, чтобы проекций этих скор остей на общую нормаль к профилям были равны:
VK1n=VK2n (7.1)
Действительно, если VK1n>VK2n то первый профиль будет вдавливаться во второй. Если VK1n<VK2n, то первый профиль будет отставать от второго, нарушиться непрерывность контакта. И то и другое недопустимо.
VK1n=VK1cos1=11cos1=1O1N1;
VK2n=VK2cos2=22cos2=2O2N2
Из (7.1) имеем: 1O1N1=2O2N2 или
![]() =
=![]()
Ho
O1N1P![]() O2N2P,
откуда
O2N2P,
откуда
![]() =
=![]() =
=![]()
Окончательно получаем:
U12=![]() =
=![]() (7.2)
(7.2)
Основная теорема зацепления (теорема Виллиса): нормаль в точке контакта профилей делит линяю центров на части» обратно пропорциональные угловым скоростям.
Точка пересечения Р называется полюсом зацепления. Если U12=const, т. Р неподвижна, если U12=const, то т. Р - подвижна.
Траектория точки контакта зубьев при ее движении относительно неподвижного звена зубчатой передачи, которая при линейном контакте зубьев определяется в ее главном сечении, называется линией зацепления.
Полюс является мгновенным центром вращения в относительном движении звеньев 1 и 2. Геометрические места точек на звеньях, которые при их движении последовательно совпадают с полюсом, называются центроидами. При U12=const центроиды - окружности.
Воображаемые окружности, жестко связанные с колесами, между которыми осуществляется передача вращательного движения, называются начальными. Начальные окружности обкатываются друг по другу без скольжения.
Следует
отметить, что Vk1![]() Vk2
вызывает
относительное скольжение профилей:
Vk2
вызывает
относительное скольжение профилей:
VK1=VK1sin1=11sin1=1N1K;
VK2=VK2sin2=22sin2=2N2K
Vck=2N2K-1N1K=2N2K+2KP+1KP
В общем случае
Vck=KP(1![]() 2)
(7.3)
2)
(7.3)
где + - для внешнего зацепления;
"-"- для внутреннего.
Как видно в полюсе скольжение равно нулю, и по мере удаления от него - увеличивается.
7.3. Цилиндрическая эвольвентная зубчатая передача.
Профиль зуба - это основной параметр, обеспечивающий нормальную работу передачи.
Для получения
постоянного передаточного отношения
в современном машиностроении наиболее
широкое распространение получило
эвольвентное зацепление. Боковые профили
зубьев в нем очерчены по эвольвенте.
Это зацепление предложено Л.Эйлером.

a) б) в) г) д) е) ж) 1 2 1
2 2 1
v 1 2
Рис.7.1. Классификация цилиндрических зубчатых передач.
![]()
2 1 О1 1 1 N1 K 1 P 2 2 2 O2 N2 n![]()
![]()
![]()
![]()
![]()
![]()
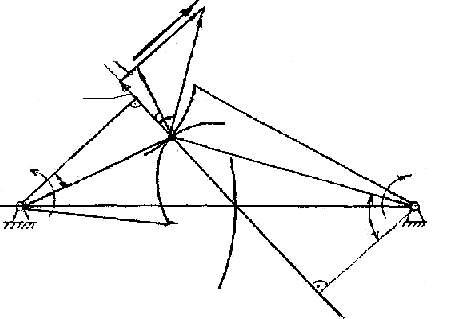
Рис.7.2. К основной теореме зацепления.
эвольвента
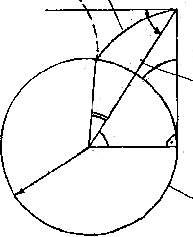 А
А
R B1
прямая В
rb O
Основная окружность
Рис.7.3 Эвольвента окружности
головка Левый профиль