

3.4.3 Графоаналитический метод кинетостатического расчета групп второго класса.
Рассмотрим порядок определения реакций для наиболее распространенных структурных групп.
Группа 1-го вида (рис.3.8).
Уравнения равновесия
![]()
![]()
![]() (3.10)
(3.10)
![]()
где
![]() -
главный вектор сил 4-го звена (сумма сил,
действующих на четвертое звено);
-
главный вектор сил 4-го звена (сумма сил,
действующих на четвертое звено);
![]() -
главный
вектор сил 5-го звена;
-
главный
вектор сил 5-го звена;
![]() -
главный
момент сил 4-го звена (сумма моментов
сил, действующих на 4-е звено относительно
точки Е 4-го звена;
-
главный
момент сил 4-го звена (сумма моментов
сил, действующих на 4-е звено относительно
точки Е 4-го звена;
![]() -
главный момент сил 5-го звена
-
главный момент сил 5-го звена
Разложим
реакцию
![]() на две составляющих: нормальную реакцию
на две составляющих: нормальную реакцию
![]() ,
направленную вдоль звена, и тангенциальную
,
направленную вдоль звена, и тангенциальную
![]() ,
направленную перпендикулярно звену
,
направленную перпендикулярно звену
![]()
Раскроем первое и второе уравнение системы (3.10)
Находим тангенциальную составляющую силу
![]()
![]()
Из
первого уравнения можно найти неизвестную
реакцию
![]() ,
а из второго - точку приложения реакции
(расстояние
,
а из второго - точку приложения реакции
(расстояние
![]() ),
если центр шарнира E
не совпадает с центром масс пятого
звена. Если указанные центры совпадают,
то все моменты сил, действующих на пятое
звено равны нулю, и необходимость в
рассмотрении второго уравнения отпадает.
),
если центр шарнира E
не совпадает с центром масс пятого
звена. Если указанные центры совпадают,
то все моменты сил, действующих на пятое
звено равны нулю, и необходимость в
рассмотрении второго уравнения отпадает.
Из третьего уравнения системы (3.10) следует
![]()
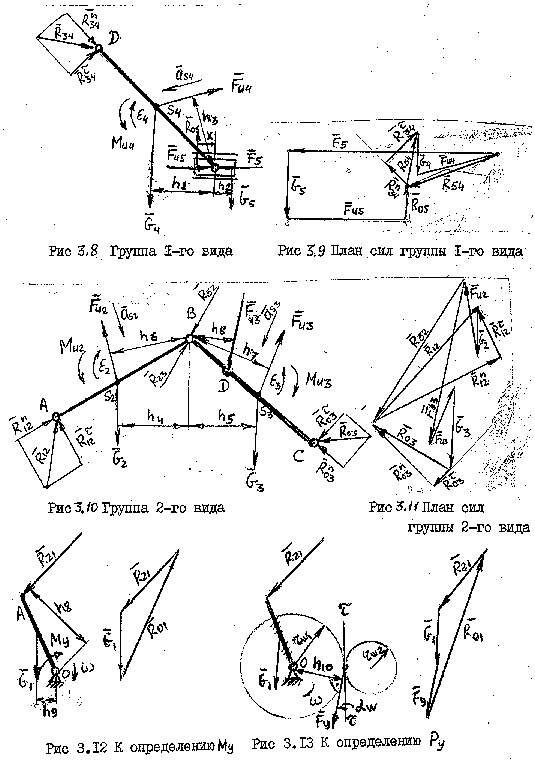
Решая
уравнение графически построением плана
сил (рис3.9), можно определить сразу два
неизвестных
![]() и
и
![]() .
Реакции
.
Реакции
![]() и
и
![]() сокращаются
вследствие того, что
сокращаются
вследствие того, что
![]() .
.
Из
плана сил в соответствии с последним
уравнением определяется реакция
![]() :.
:.
![]()
2. Группа 2-го вида
Уравнения равновесия
![]()
![]() (3.11)
(3.11)
![]()
![]()
Из
первого уравнения (3.11), аналогично
методике, расчета группы 1-го вида, можно
определить реакцию
![]() ,
а из второго –
,
а из второго –
![]() .
При этом
необходимо учесть, что ко всем внешним
силам, действующим на звенья, добавилась
известная из расчета предыдущей группы
реакция со стороны 4-го звена
.
При этом
необходимо учесть, что ко всем внешним
силам, действующим на звенья, добавилась
известная из расчета предыдущей группы
реакция со стороны 4-го звена
![]() .
Эта реакция приложена в точке соединения
3-го и 4-го звеньев.
.
Эта реакция приложена в точке соединения
3-го и 4-го звеньев.
![]()
![]()
откуда
![]()
![]()
откуда
![]()
Из
третьего уравнения определяются
неизвестные реакции
![]() .
.
Рассмотрим равновесие группы в целом
![]()
Четвертое
уравнение позволяет найти внутреннюю
реакцию
![]() .
.
![]()
Применяя подобную методику можно провести кинетостатический расчет и структурных групп других видов.
Кинетостатика ведущего звена.
Ведущее
звено имеет степень подвижности
![]() .
Чтобы обеспечить равновесие этого
звена, необходимо к нему добавить или
силу или момент силы, уравновешивающие
со стороны второго звена
.
Чтобы обеспечить равновесие этого
звена, необходимо к нему добавить или
силу или момент силы, уравновешивающие
со стороны второго звена
![]()
Уравновешивающая сила или уравновешивающий момент создается устройствами, приводящими ведущее звено в движение. Когда ведущее звено связано с приводом через муфту или планетарный механизм, следует рассматривать прикладываемый к ведущему звену уравновешивающий момент (рис,3.12), если движение передается через зубчатые колеса непланетарной передачи следует рассматривать уравновешивающую силу (рис.3,13).
Величина этой силы или момента сил находятся из уравнений равновесия
![]()
![]() (3.12)
(3.12)
Раскрывая эти уравнения находим: для схемы на рис. 3.12
![]()
![]()
Для схемы на рис.3.13
![]()
![]()
где
![]()
![]() -
радиус начальной окружности колеса
-
радиус начальной окружности колеса
![]() -
угол зацепления колес
-
угол зацепления колес
Неизвестными
в этих уравнениях являются ![]() .
Первые два
неизвестных определяются алгебраически
из первых двух уравнений, а реакция
.
Первые два
неизвестных определяются алгебраически
из первых двух уравнений, а реакция
![]() находится из соответствующего плана
сил(рис.3.12 и рис.3.13).
находится из соответствующего плана
сил(рис.3.12 и рис.3.13).
Лекция 11
План лекции