

4.7. Метод квадратичного приближения.
Функцию представляют в виде полинома:
D(z)=A[P1f1(z)+P2f2(z)+…+Pnfn(z)-F(z)] (4.14)
где AiPi - коэффициенты, зависящие от заданных и искомых параметров
fi(z) - функции, зависящие только от исходных параметров
![]()
, что гарантирует минимум ( S путь) отклонения кв. Решение все равно приближенное.
Пример, Пусть надо реализовать функцию S=kd2 (S путь). Будем осуществлять эту функцию кривошипно-шатунным механизмом (рис. 4. 7)
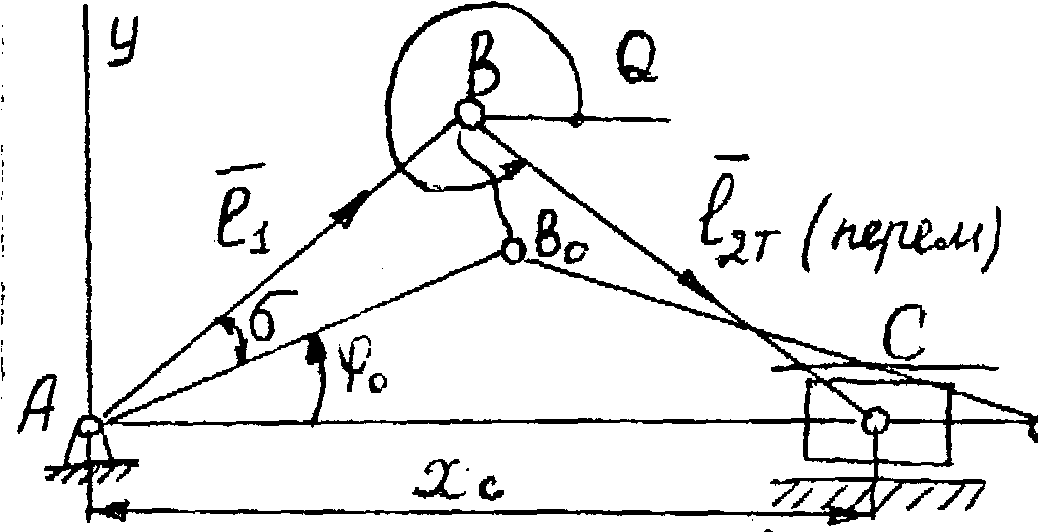
Рис. 4. 7 К методу квадратичного приближения.
Составляем уравнения
Szi=0 l1cos(j0+s)+l2cosq=zc
Syi=0 l1sin(j0+s)+l2sinq=0
Перемещение будет идеальным, если l2. будет переменным, поэтому обозначим l2 как l2т /требуемое/. Возводим уравнения в квадрат и складываем
L2T2=zC2-2l2zC(cosj0+s)+l12
За текущую функцию принимаем
D(z)=l22-l2T2=D(s)
D(z)=A[Pifi(s)+P2f2(s)+P3f3(s)]=F(s)
Например, для данного случая, получим
A=1, P1=2l1cosj0, f1(s)=zccoss
Система для нахождения Pi :
a11P1+a12P2+a13P3=b1
a21P1+a22P2+a23P3=b2
a31P1+a32P2+a33P3=b3
![]()
![]()
Решение по этому методу несколько точнее, чем по предыдущему методу.
Тема 5 Синтез плоских рычажных механизмов (4 часа)
Лекция 21
План лекции
5.1 Основные условия и ограничения при синтезе.
5.2 Синтез четырехзвенного кривошипно-коромыслового. механизма по трем положениям, аналитическим методом.
5.3 Синтез четырехзвенного кривошипно-коромыслового механизма по двум крайним положениям коромысла, коэффициенту изменения средней скорости и допускаемому углу давления.
5.1 Основные условия и ограничения при синтезе.
В зависимости от требований к характеру работы механизмов синтез проводят:
По нескольким заданным положениям звеньев.
По отдельным кинематическим параметрам /скорости, коэффициенту изменения средней скорости, угловому ускорению и т.д./
По заданной траектории точки /например, прямая линия, окружность/.
По заданной функции.
Перечисленные параметры могут быть выбраны в качестве основных условий синтеза - целевых функций. Однако при реализации этих функций необходимо учитывать и дополнительные условия синтеза - ограничения, которыми могут явиться:
Конструктивное ограничение длин звеньев и минимальные габариты.
Условия проворачиваемости звеньев.
Максимальные допустимые углы давления.
Точность воспроизведения заданного закона.
Синтез может проводиться аналитическими или, графическими методам. Рассмотрим основные из этих методов.
5.2 Синтез четырехзвенного кривошипно-ползунного коромыслового механизма по трем положениям аналитическим методом.
Для
рассматриваемого механизма
/рис.
5.1/
известен закон движения коромысла
![]() .
.
Требуется
определить размеры звеньев этого
механизма при которых может быть
реализована заданная функция т.е.
неизвестными являются:
![]() .
Для уменьшения количества неизвестных
с четырех до трех, размеры
.
Для уменьшения количества неизвестных
с четырех до трех, размеры
![]() представим
виде относительных величин:
представим
виде относительных величин:
![]()
В
соответствии с этим количеством
неизвестных, используя метод
интерполирования на некотором участке
функции
![]() наметим три
точки в которых заданная
наметим три
точки в которых заданная
![]() и реально воспроизводимая зависимость
и реально воспроизводимая зависимость
![]() пересекаются.
пересекаются.
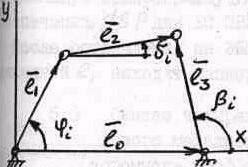
Рис.5.1 Кривошипно-коромысловый механизм.
![]()
![]()





![]() 3
3
![]()

![]() 2
2
![]() 1
1
![]()
![]()
![]()
![]()
Р ис.
5.2 Функции положения.
ис.
5.2 Функции положения.
Для этих точек можно записать следующие уравнения
 (5.1)
(5.1)
Представим механизм в виде замкнутого векторного контура. Тогда из условия замкнутости
![]() (5.2)
(5.2)
В проекциях на координатные оси уравнение(5.2) можно представить в виде:
![]()
Разделим все члены уравнения (5.3) на l1 и перегруппируем члены. Так как:
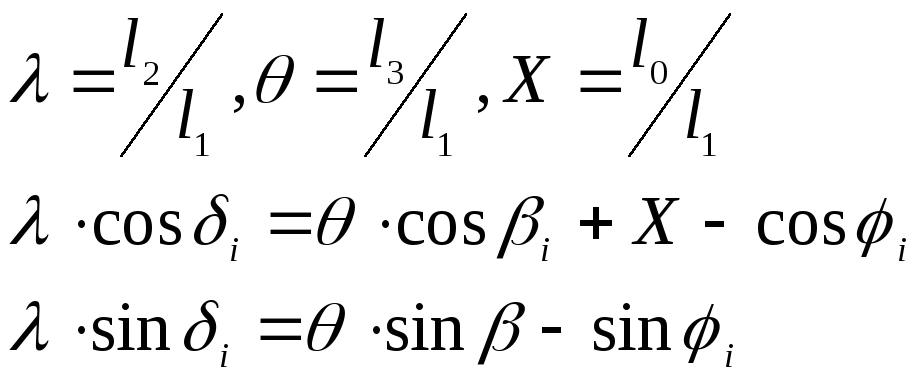
![]()
Возводя уравнения в квадрат и складывая, получим:
![]()
![]()
Обозначим:
![]() ,
тогда уравнение
6 примет
вид:
,
тогда уравнение
6 примет
вид:![]()
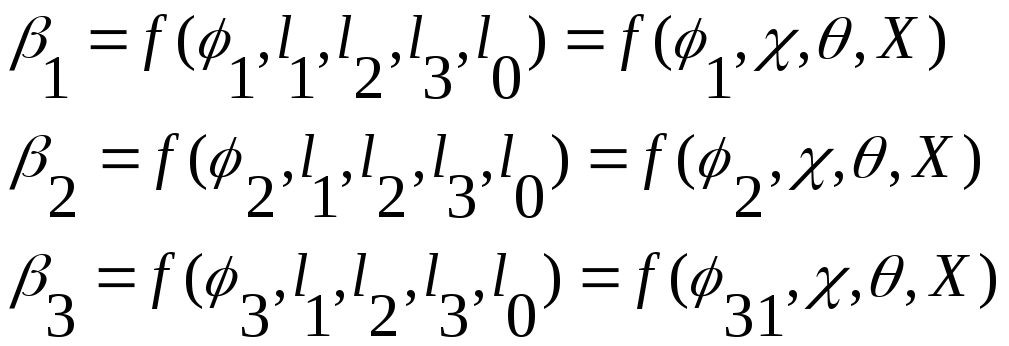
С учетом i=1..3, и зависимостей (5.1) для трех положений механизма можно записать три уравнения
 (5.3)
(5.3)
Неизвестными
в системе нелинейных уравнений (5.3)
являются
![]() .
Решение этих уравнений с целью определения
неизвестных целесообразно проводить
на компьютере, используя специальную
подпрограмму библиотеки математического
обеспечения .
.
Решение этих уравнений с целью определения
неизвестных целесообразно проводить
на компьютере, используя специальную
подпрограмму библиотеки математического
обеспечения .
После определения на компьютере искомых неизвестных, задаваясь величиной l1 находят размеры остальных звеньев механизма.