

7.14. Толщина зуба по произвольной окружности.Условие отсутствия заострения
Из рис. 7.16, б следует: x+x=+.Учитывая, что угол в радианах есть отношение дуги к радиусу:
![]() ,
,
![]()
и что =inv, x=invx ( - угол зацепления), получим:
Р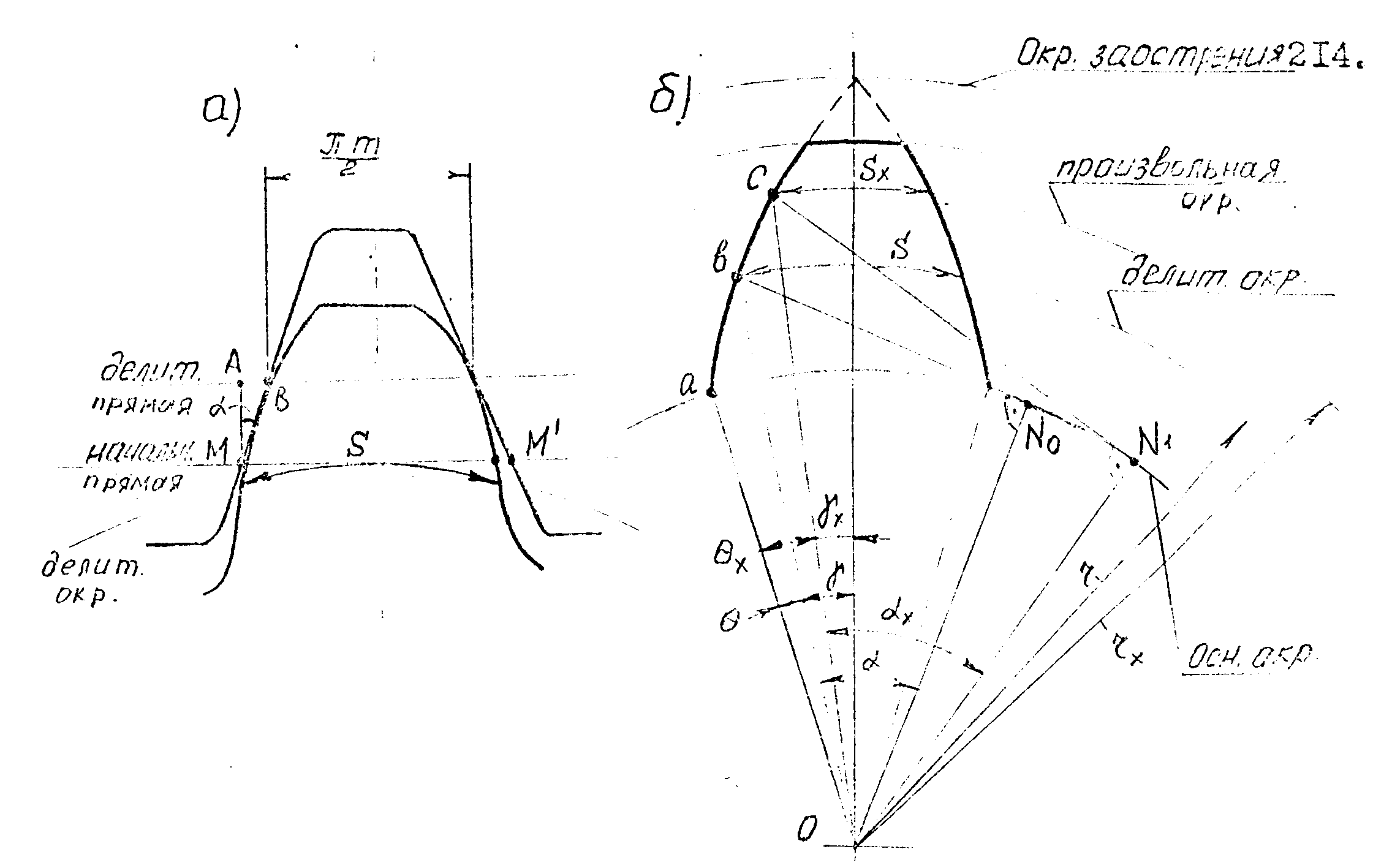 ис.
7.16. Определение толшины зуба по делительной
и произвольной окружности.
ис.
7.16. Определение толшины зуба по делительной
и произвольной окружности.
Р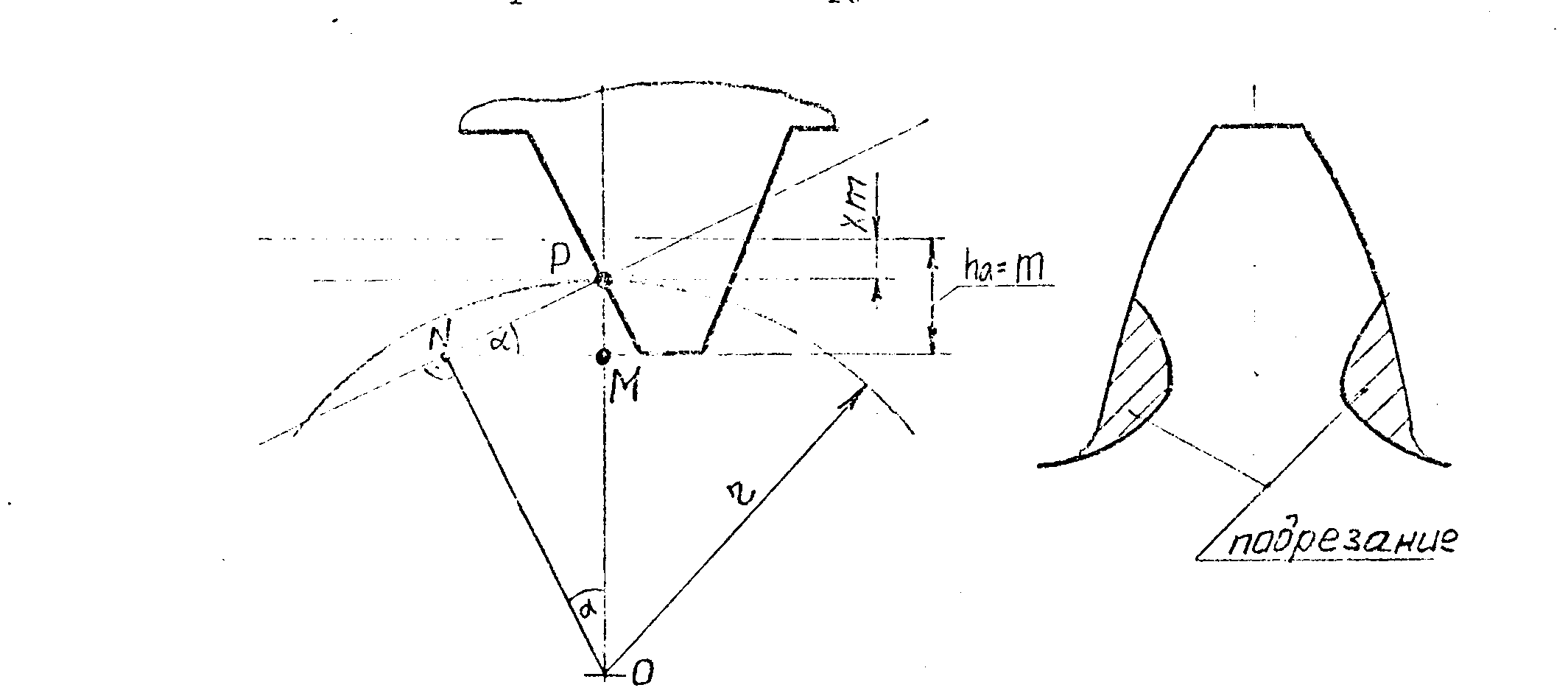 ис
7.17. Подрезание зуба.
ис
7.17. Подрезание зуба.
Р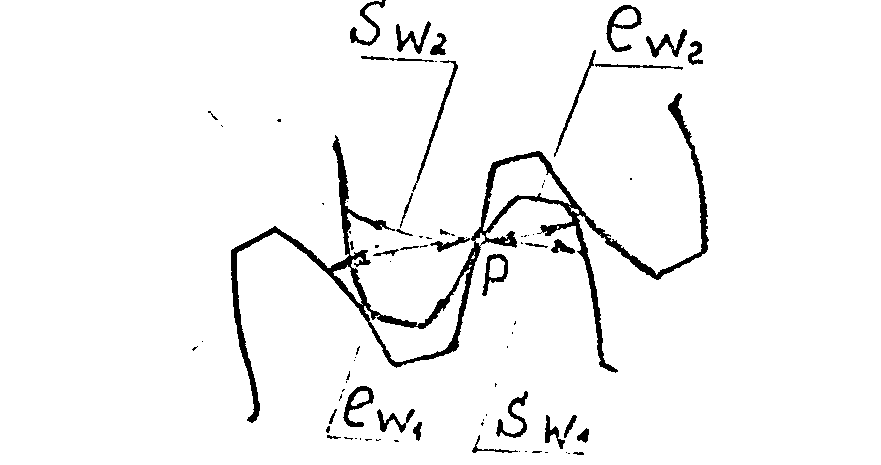 ис.
7.18. К выводу основного уровнения
зацепления.
ис.
7.18. К выводу основного уровнения
зацепления.
![]() .
.
Откуда
![]() .
.
Учитывая, что r=mz/2, rx=mxz/2,
![]() ,
,
получим окончательно
![]() ,
(7.12)
,
(7.12)
где =20, mx=px/, x=rb/rx
Условие отсутствия заострения
При нарезании положительных колес с увеличением коэффициента смещения толщина зуба у вершины Sa будет уменьшаться. При некотором xmax наступает заострение зуба, Sa =0. Эта опасность наиболее вероятна при z< 15. Во избежание излома вершины заостренного зуба коэффициент смещения назначают так, чтобы соблюдалось условие Sa0,2m где
![]()
Если условие не выполняется, необходимо уменьшить x.
Зависимость между модулями по делительной и произвольной окружностям
Из основной теоремы зацепления имеем,
rb=rcos=rxcosx ,
откуда
![]() ,
,
где rb и rx - радиусы основной и произвольной окружностей.
Учитывая, что ri=miz/2 , получим
![]() .
(7.13)
.
(7.13)
А так как mi=Pi/, то получим, что шаги по разным окружностям не равны между собой:
![]() .
.
7.15. Условие отсутствия подрезания
При малых числах зубьев обрабатываемого колоса может наблюдаться интерференция зубьев инструмента и колеса. В этом случае режущие кромки инструмента срежут часть обрабатываемого зуба, на которую они накладываются.
Срезание части номинальной поверхности у основания зуба обрабатываемого зубчатого колеса в результате интеференции зубьев при станочном запеллеяяи называется подрезанием .
Значительное подрезание ослабляет ножку зуба и может срезать часть эвольвенты, поэтому оно является недопустимым,,
Явление подрезания при нарезании совиздает с явлением заклинивания в реечной передаче. Оно происходят, когда активная линия зацепления выходит за пределы линии згщепления. В реечном зацеплении эта линия ограничена т. N (рис. 7.17.), следовательно, предельный случай, когда подрезания нет, характеризуется совпадением точек А и N , т.е. когда прямая точек притупления проходит через т. A (скругленный участок ИПК не учитывается, т.к. эвольвентная часть зуба образуется только прямолинейным участком). Условие отсутствия подрезания:
ha-xmPM
Но ha=m, а из NPM PM=PNsin.
Из PNO: PN=OPsin=mzsin/2.
Тогда
![]()
или
![]()
где xmin - наименьший коэффициент смещения, при котором отсутствует подрезание.
При =20°
![]() .
(7.14)
.
(7.14)
Ддя устранения подрезания при числе зубьев меньше 17 необходимо применять положительное смещение, определяя его величину по (7.14). При z=17 x=0, для колес с z>17 можно применять .шобое смещение. т.к. xmin<0
Лекция 30
План лекции
7.16 Эвольвентное беззазорное зацепление. Определение межосевого расстояния и угла зацепления. Воспринимаемое и уравнительное смещение.
7.17 Проектирование зубчатых передач. Выбор коэффициента смещения.
7.18 Косозубая цилиндрическая передача,
7.16 Эвольвентное беззазорное зацепление. Определение
межосевого расстояния и угла зацепления. Воспринимаемое и уравнительное смещения
Покажем беззазорное зацепление пары зубчатых колес, нарезанных со смещением исходного контура.
Так как начальные окружности перекатываются без скольжения то на них толщина зуба одного колеса равна ширине впадины другого, и поэтому шаг равен сумме толщин зубьев.
![]()
Подставив значения толщин зубьев, получим

откуда угол зацепления передачи равен
![]()
обозначим
![]() -
коэффициент суммарного смещения.
-
коэффициент суммарного смещения.
![]() суммарное
число зубьев.
суммарное
число зубьев.
После этого выражение для угла зацепления принимает вид
![]()
Межосевое расстояние в зацеплении равно сумме радиусов начальных окружностей:
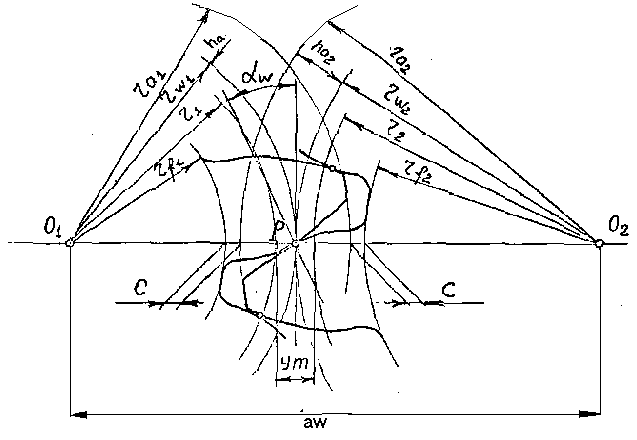
Рис. 7.16 Эвольвентное беззазорное соединение.
![]()
Иногда эту формулу записывают в следующем виде
![]()
где
 -
сумма радиусов делительных окружностей,
-
сумма радиусов делительных окружностей,
![]() -
расстояние между делительными окружностями
в зацеплении, называемое воспринимаемым
смещением,
-
расстояние между делительными окружностями
в зацеплении, называемое воспринимаемым
смещением,
у - коэффициент воспринимаемого смещения
который характеризует изменение межосевого расстояния и определяется выражением:

В зависимости от величины и знака суммарного смещения можно мучить три типа передач: нулевую, положительную и отрицательную
В
нулевой передаче:
![]() начальные и делительные окружности
совпадают.
начальные и делительные окружности
совпадают.
В
положительной передаче:
![]() начальные
окружности больше делительных,
начальные
окружности больше делительных,
В
отрицательной передаче:
![]() делительные окружности пересекаются,
так как они больше начальных.
делительные окружности пересекаются,
так как они больше начальных.
Воспринимаемое
смещение не равно суммарному. Если взять
![]() ,
то получится большой боковой зазор
между зубьями, во избежании которого и
осуществляется обратное смещение,
называемое уравнительным. Оно определяется
выражением
,
то получится большой боковой зазор
между зубьями, во избежании которого и
осуществляется обратное смещение,
называемое уравнительным. Оно определяется
выражением
![]()
где,
![]() -
коэффициент уравнительного смещения.
-
коэффициент уравнительного смещения.
Для того, чтобы в проектируемом зацеплении получить стандартный радиальный зазор, в станочном зацеплении уменьшают высоту зуба на величину уравнительного смещения.
Высота начальной головки зуба определяется выражением:
![]()
откуда коэффициент начальной высоты головки зуба равен
![]()
Этот коэффициент входит в формулу для определения Zminиз условия отсутствия заклинивания.