

Тема 9. Основы теории машин - автоматов. ( 4 часа)
Лекция 33.
План лекции:
9.1. Основные понятия теории машин-автоматов.
Машина-автомат и автоматическая линия.
Управление от копиров.
Следящий привод.
9.1. Основные понятия теории машин-автоматов.
9.1.1. Машина-автомат и автоматическая линия.
Машина-автомат есть машина, в которой все преобразования энергии, материалов и информации выполняются без непосредственного участия человека. Совокупность машин-автоматов, соединенных между собой автоматическими транспортными устройствами предназначенных для выполнения определенного технологического процесса, называется автоматической линией.
Применение машин-автоматов и автоматических линий требует участие человека (оператора-наладчика) лишь для контроля за работой и возможного устранения отдельных неполадок. Наибольшее распространение имеют технологические машины-автоматы, которые предназначены для изменения формы, размеров или свойств обрабатываемого предмета. В технологических машинах каждое твердое тело, выполняющее заданные перемещения с целью изменения или контроля формы, размеров и свойств обрабатываемого предмета называется исполнительным органом. Обычно исполнительные органы соединены с выходными звеньями механизмов, но могут быть приведены в движение и непосредственно от двигателей (например, шлифовальный круг, помещенный на валу электродвигателя).
Движение исполнительных органов в машинах автоматах определяется программой, под которой понимается совокупность предписаний, обеспечивающих выполнение технологического процесса. Для автоматического выполнения программы предусматривается система управления, т.е. система, обеспечивающая согласованность перемещений всех исполнительных органов в соответствии с заданной программой.
9.1.2. Управление от копиров.
Управление перемещениями одного исполнительного органа может быть достигнуто посредством механизма, схема и параметры которого выбраны в соответствии с заданной программой машины-автомата. Если эта программа должна быть различной при обработке законом движения выходного звена. Например, если требуется получить перемещения исполнительного органа по различным траекториям то применяется механизм со сменными неподвижными кулачками, называемыми копирами.
На
рис, 9.1. показан механизм, предназначенный
для управления перемещениями режущего
инструмента
( фрезы или
шлифовального круга
) при
обработке цилиндрической поверхности
по способу непосредственного копирования.
Ползун
1 получает
в горизонтальном направлении
перемещение
S3,
которое называется задающей
подачей.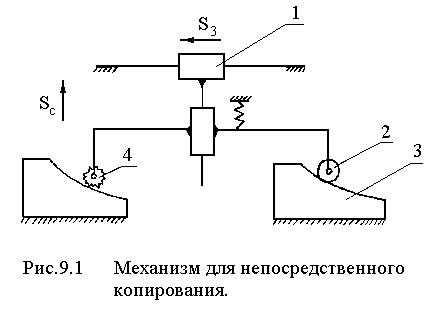
Щуп 2 под действием замыкающего устройства постоянно прижат к копиру 3 и поэтому кроме горизонтального перемещения получает также перемещение в вертикальном направлении Sc, которое называется следящей подачей. Режущий инструмент 4, связанный с щупом 2, повторяет ( копирует) движение щупа. Для получения различных движений инструмента надо иметь сменные копиры. Аналогичная схема обработки получается при вращательной задающей подаче, которая в этом случае сообщается заготовке и копиру.
Способ непосредственного копирования применяется редко в следствии больших нагрузок на копир, который быстро изнашивается. Для уменьшения нагрузок на копир, применяется следящий привод.