

6.10. Графическое определение текущих углов давления.
После определения минимального радиуса кулачка ro , эксцентриситета e и межосевого расстояния ОС, найдем текущие углы давления в разных положениях механизма. Для этого из оси вращения кулачка к концам повернутых аналогов скоростей проведем лучи.
Для механизма с поступательным толкателем (рис.6.19), текущий угол давления в i положении будет угол между этим лучом и осью S .
Для механизма с коромысловым толкателем (рис. 6.20) текущим углом давленая будет угол между перпендикуляром к лучу и направлением аналога did в данной точке.
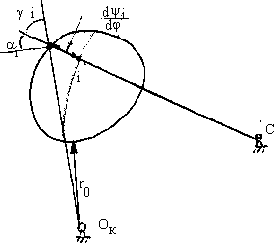
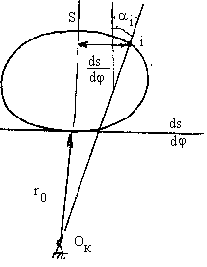
Рис. 6.19 Определение углов Рис. 6.20 Определение углов
давления в механизме с давления в механизме с поступ. толкателем. кором. толкателем.
6.11 Аналитический метод определения основных размеров кулачкового механизма по заданному допускаемое углу давления.
Задача
![]() определенияro
может быть решена и аналитически. Из
уравнения (6.2) находим
определенияro
может быть решена и аналитически. Из
уравнения (6.2) находим
ro=![]() (6.3)
(6.3)
При е = 0 равенство (6.3) упрощается
![]()
Значение угла доп отвечающее экстремальной величине ro, можно найти, взяв частную производную
![]() =
=![]()
и приравнивая нулю находим
d2s/d2=ds/dtgдоп (6.5)
Подставляя соответствующие зависимости ds/d и d2s/d можно определить минимальную величину ro .
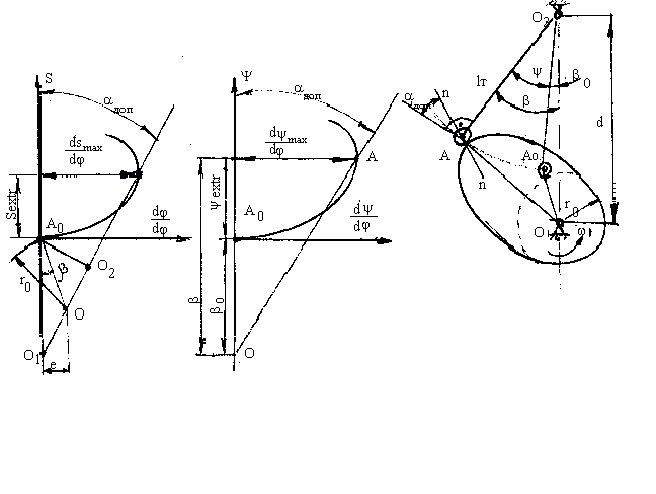
Для проектирования кулачкового механизма с применением ЭВМ более удобным является метод М.В.Семенова, позволяющий получить простой алгоритм и несложные аналитические зависимости. По этому методу к диаграмме ds/d (s) под углом доп проводят секущую АО1, проходящей через точку с абсциссой, равной dsmax / d фазе подъема, и ось кулачка помещают на этой прямой (рис. ). Наименьший начальный радиус ro min можно получить, если ось кулачка в точке O2 на перпендикуляре AоО2 к прямой АО1 Однако при этом сильно возрастают углы давления на фазе приближения. Поэтому ось кулачка помещают в точке 0 на прямой АО0, проведенной по углом
=(0.6. . .0.75)доп к оси S . На основании данных рис. 2.21 имеем
ro=(
dsmax
/
d.ctgдоп-Sextr).
![]() (6.6)
(6.6)
e= ro.sin (6.7)
Для определения основных размеров механизма с коромы-словым толкателем используем диаграмму d/d()(рис.6.22). После проведения секущей АО
extr= dmax /dctgдоп (6.8)
Формулы для межосевого расстояния d и начального радиуса могут быть получены из геометрии механизма.
D=eT /cos
ro=d![]() (6.9)
(6.9)
Ф
ЭВМ.
|
Рис. 6.21. Определение основных размеров в механизме с пост. тол-кателем |
Рис. 6.22. Определение основных размеров в механизме с коромысловым толкателем. |