

1. 5. 2 Классификация кинематических пар по числу связей.
Пока звенья не соединены в кинематическую пару, то каждое звено имеет 6 степеней свободы: три возможных поступательных перемещения вдоль трех неподвижных координатных осей и три вращательных движения вокруг этих осей.
Соединение двух звеньев в кинематическую пару приводит к тому, что при движении относительно друг друга звенья не имеют возможности осуществлять
все движения свободного тела, т. е. теряют некоторые из степеней свободы. Это объясняется тем, что в каждой контактной точке звеньев вектор относительной
скорости
направлен по общей касательной ![]() соприкасающимся поверхностям рис. 1.4.,
а относительное движение вдоль общей
нормали n-n
соприкасающимся поверхностям рис. 1.4.,
а относительное движение вдоль общей
нормали n-n
невозможно,
так как в противном случае н Рис
1.4 Условие контакта двух звеньев
Рис
1.5 Относительное движение звеньев в
кинематической паре

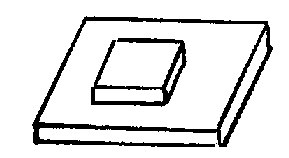
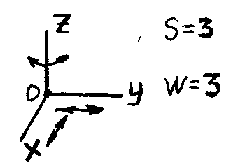
движение звеньев, называют связями. Комбинация связей во всех контактных точках, зависящая от конструктивной формы элементов кинематической пары, приводит к тому или иному виду относительного движения. Например: в сферической паре звено 2 рис.. 1. 5 относительно 1 имеет три возможных независимых вращательных движения вокруг осей X,Y,Z. На три движения вдоль этих осей наложены связи.
Число степеней свободы кинематической пары в относительном движении звеньев W=6-S, (1.1).
где S -число условий связей, налагаемое элементами кинематической пары на относительное движение звеньев.
В примере рисунка S=3 и W=6-3=3
Если
S=6,
то два
звена жестко связаны, в этом случае
кинематическая пара отсутствует.
Если S
=0, то два звена свободны друг от друга,
т.
е. тоже нет
кинематической пары. Следовательно,
S
находится в пределах ![]() и т.д.
и т.д.
Классификация кинематических пар Таблица 1.1
|
S=1 W=5 |
|
|
|
S=2 W=4 |
|
|
|
S=3 W=3 |
|
|
|
S=4 W=2 |
|
|
|
S=5 W=1 |
|
|
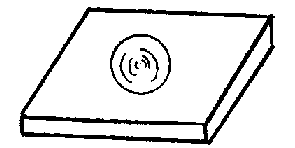
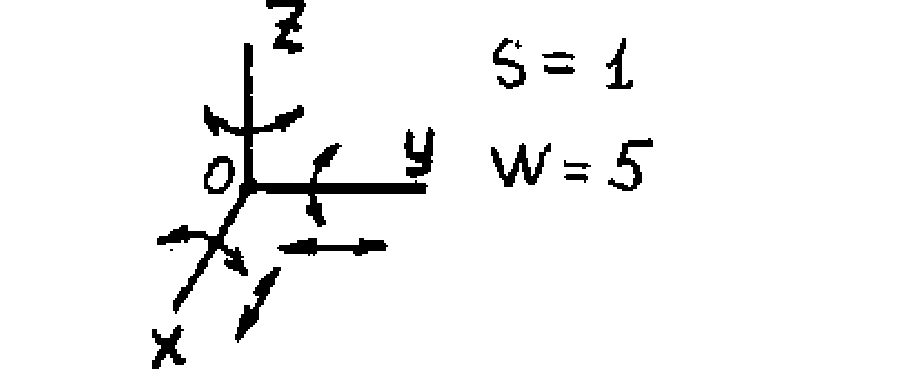
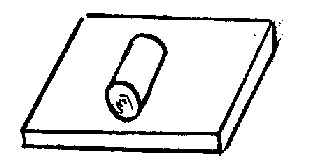
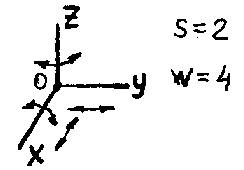

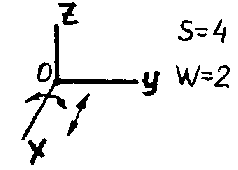
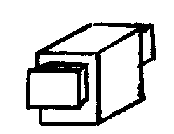
Ко второму классу относятся пары с S =2 и т. д. Примеры наиболее распространенных кинематических пар с их условными обозначениями приведены в таблице 1.1. Стрелками показаны возможные независимые движения одного звена относительно другого.
Кинематическую пару можно рассматривать как двухзвенную кинематическую цепь, предназначенную для воспроизведения требуемого относительного движения звеньев. Иногда для воспроизведения этого движения применяют кинематическую цепь с числом звеньев более двух, конструктивно, заменяющую в механизме кинематическую пару. Такая цепь называется кинематическим соединением. Примером кинематического соединения может быть шарикоподшипник, который по сравнению с эквивалентной вращательной парой дает уменьшение трения. Последовательное соединение четырех вращательных пар с пересекающимися осями заменит сферическую пару .