

3.4.4 Аналитический метод кинетостатического
расчета групп второго класса.
3.4.5 Кинетостатика ведущего звена.
3.4.4 Аналитический метод кинетостатического
расчета групп звеньев второго класса.
Этот метод основан на применении матриц к решению скалярных уравнений равновесия групп Ассура.
В отличие от графоаналитического метода все силы известные и неизвестные, внешние и внутренние, действующие на звенья группы, раскладываются в виде проекций на координатные оси (рис.3.14 и рис. 3.15).
Для групп Ассура, каждая из которых имеет 6 неизвестных, составляются по 6 скалярных уравнений равновесия.
Этими уравнениями являются
1. Уравнения главного момента сил звеньев.
Уравнения проекций главного вектора сил группы и звена на координатные оси.
Получить уравнения равновесия можно из выражений (3.10) и (3.11), если представить последние два векторных уравнения в виде скалярных как проекции сил на координатные оси.
Для группы 1-го вида Для группы 2-го вида
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Раскроем уравнения равновесия.
Принимаем
предварительно направление действия
сил:
![]() -
к точке действия;
-
к точке действия;![]() -
вправо,
-
вправо,![]() -
вниз,
-
вниз,![]() -
вверх,
-
вверх,![]() -
влево,
-
влево,![]() -
вправо,
-
вправо,![]() -
вниз,
-
вниз,![]() -
вверх. Действительное направление
действия сил определится после решения
уравнений равновесия.Положительное
направление действия моментов принимаем
по часовой стрелке, положительное
направление действия сил принимаем
вверх.
-
вверх. Действительное направление
действия сил определится после решения
уравнений равновесия.Положительное
направление действия моментов принимаем
по часовой стрелке, положительное
направление действия сил принимаем
вверх.
Для группы 1-го вида (рис.3.14)
![]()
![]()
![]()
![]()
![]()
![]()
Неизвестными
в данной системе являются
![]() и расстояние
и расстояние
![]() .
Данная система из-за присутствия во
втором уравнении произведения неизвестных
является нелинейной. Решение можно
проводить численными методами на ЭВМ
с использованием стандартной подпрограммы
.
Данная система из-за присутствия во
втором уравнении произведения неизвестных
является нелинейной. Решение можно
проводить численными методами на ЭВМ
с использованием стандартной подпрограммы
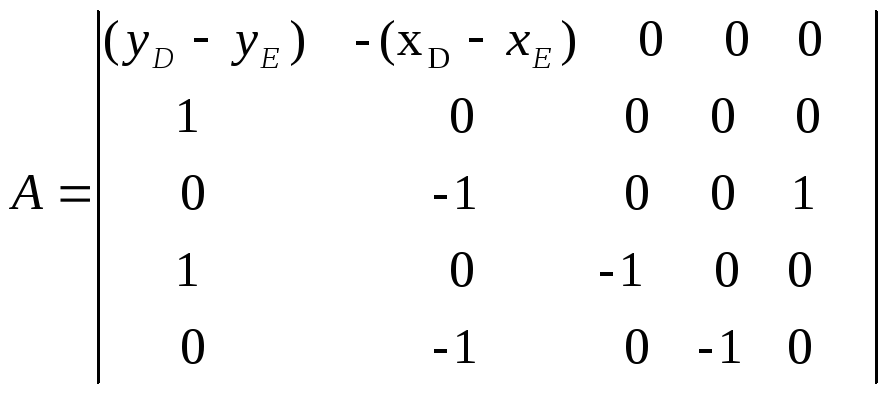
Данную систему можно привести к линейной системе, но меньшего порядка: пять уравнений с пятью неизвестными. Второе уравнение будем решать отдельно. Упорядочим расстановку членов в системе уравнений, перенеся известные члены в правую часть, а в левой части – неизвестные, расставив их в определенном порядке
![]()
![]()
![]()
![]()
![]()
Преобразованную систему уравнений можно записать в матричной форме
 (3.13)
(3.13)
Или
![]()
где,
![]() - квадратная матрица коэффициентов,
стоящих перед неизвестными;
- квадратная матрица коэффициентов,
стоящих перед неизвестными;
![]() -
матрица- столбец неизвестных членов;
-
матрица- столбец неизвестных членов;
![]() -
матрица- столбец свободных членов правой
части преобразованной системы уравнений
-
матрица- столбец свободных членов правой
части преобразованной системы уравнений

![]()
![]()
![]()
![]()
![]()
Р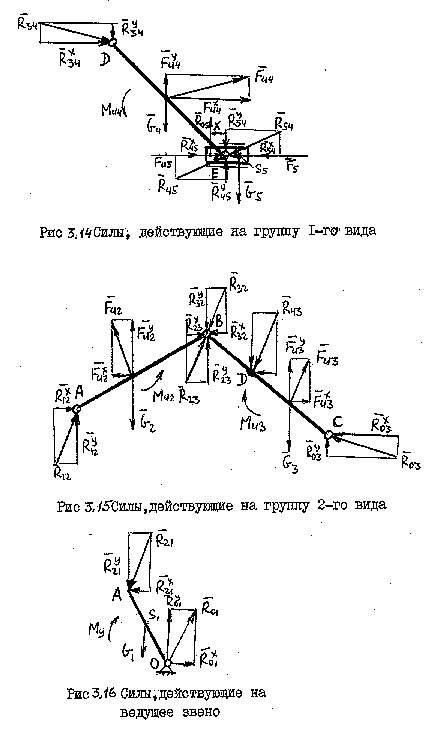 ешение
матричного уравнения целесообразно
проводить на компьютере с использованием
стандартной подпрограммы.
ешение
матричного уравнения целесообразно
проводить на компьютере с использованием
стандартной подпрограммы.
После
нахождения неизвестных, в частности
силы
![]() ,
находим
расстояние
,
находим
расстояние ![]()
![]()
![]()
Аналогично можно получить н матричное уравнение для группы 2-го вида (рис.3.15).
Кинетостатический расчет ведущего звена производится на основе уравнений равновесия (3.12). Второе векторное уравнение представляется в виде двух скалярных уравнений проекций сил на координатные оси, т.е.
![]()
![]()
![]()
В соответствии с рис.3.16
![]()
![]()
![]()
Решение
данной системы уравнений и нахождение
неизвестных ![]() по методике, изложенной для групп Ассура,
не представляет затруднений.
по методике, изложенной для групп Ассура,
не представляет затруднений.




























