

9.2. Фазы движения толкателя
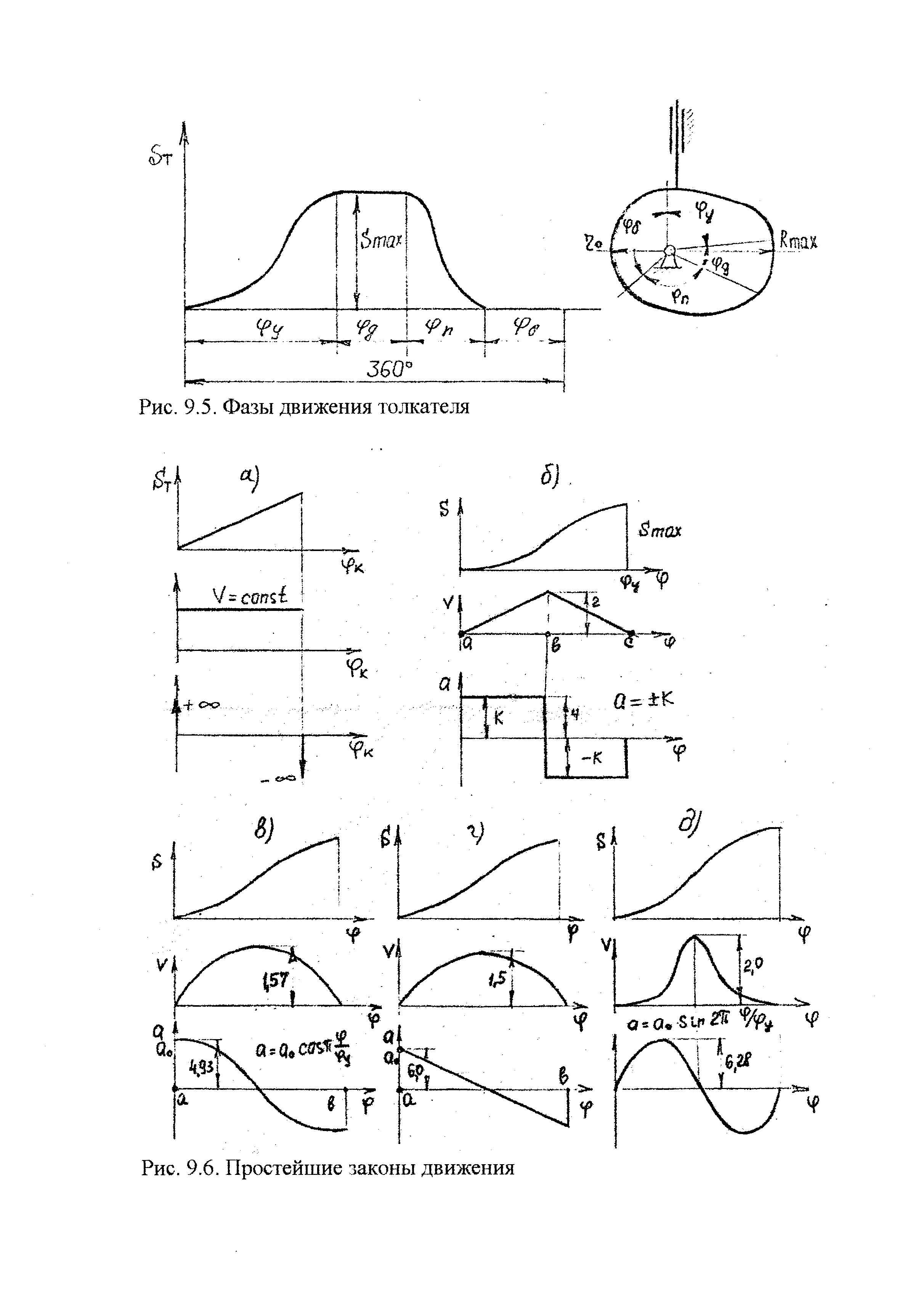
В общем случае график зависимости между перемещением толкателя S и углом поворота кулачка k имеет вид (рис. 9.5). На этом графике внутри цикла ц = 2 можно выделить 4 фазы:
1. Фаза удаления y) - толкатель удаляется от центра кулачка.
2. Фаза дальнего стояния (d) - при вращении кулачка толкатель
находится в покое в дальнейшем положении.
3. Фаза приближения (п) - толкатель приближается к центру кулачка.
4. Фаза ближнего стояния (σ) - толкатель находится в покое в
ближнем положении
(y) + (d) + (п) + (σ) = 3600
Одна или обе фазы стояния могут отсутствовать.
9.3. Обоснование выбора закона движения
Закон движения толкателя кулачкового механизма - это зависимость между перемещением толкателя и углом поворота кулачка.
Перемещение толкателя Smax или max и фазовые углы поворота кулачка определяются технологическим процессом, при синтезе механизма считаются заданными. Закон же, по которому происходит это движение внутри фаз удаления и приближения, часто не имеет значения с точки зрения выполнения толкателем своего назначения. (Иногда могут быть ограничения по Vmax и/или amax или требования по характеру движения, например, V = const на некотором участке, обусловленные технологией). Закон движения, выбираемый конструктором, должен соответствовать технологии и быть таким, чтобы динамические усилия, возникающие при движении толкателя, не сказывались на точности и долговечности механизма.
Судить о законе движения толкателя по кривой S() трудно, так как эти кривые внешне мало отличаются. Кривые ускорения (вместе с графиками скорости) дают более полное представление о плавности движения, наличии ударов и так далее. Поэтому при выборе закона движения обычно задаются диаграммой ускорения. Диаграмму S(φ), необходимую для построения профиля кулачка, получают двукратным интегрированием графика ускорения.
Простейшим законом является закон постоянной скорости (рис. 9.6, а). При таком законе в начале и конце фазы имеет место мгновенное возрастание ускорения до бесконечности. Это изменение вызовет мгновенное изменение ускорения (Fи = mа) от нуля до бесконечно большого значения. В результате в эти моменты времени происходит "жесткий удар". Такой закон может применяться при малых массах толкателя и скоростях.
Наибольшее распространение получили четыре относительно простых закона.
1. Закон постоянного ускорения (параболический) (рис. 9.6, б). При таком законе скорость на участке ab равномерно возрастает, затем равномерно убывает. Однако в точках а, b, с ускорение мгновенно изменяется на конечную величину. Будут иметь место "мягкие удары". Причем в точке b ускорение изменяется и по направлению.
2. Косинусоидальный закон (рис. 9.6, в). Отсутствуют изменения ускорения по направлению, однако в точках а и b будут мягкие удары. Между ними скорость и ускорение изменяются плавно.
3. Линейно убывающий закон (рис. 9.6, г). В точках а и b - мягкие удары.
4. Синусоидальный закон (рис. 9.6, д). В этом законе скорость и ускорение изменяются плавно. И свое изменение начинают и заканчивают нулевыми значениями. Поэтому скачков а, значит, и ударов нет. Особенностью закона является медленное нарастание и снижение скорости.
Таким образом, с точки зрения безударности предпочтительней синусоидальный закон. Законы движения с мягкими ударами могут применяться в механизмах с частотой вращения до 2000 об/мин.
Для более обоснованного выбора закона движения необходимо учитывать относительные значения максимальных значений скорости и ускорения (при одинаковых Smax и ?). С этой точки зрения, как видно из рис. 9.6, синусоидальный закон дает наибольшее значение аmax = 6,28, а параболический - наименьшее amax = 4 .
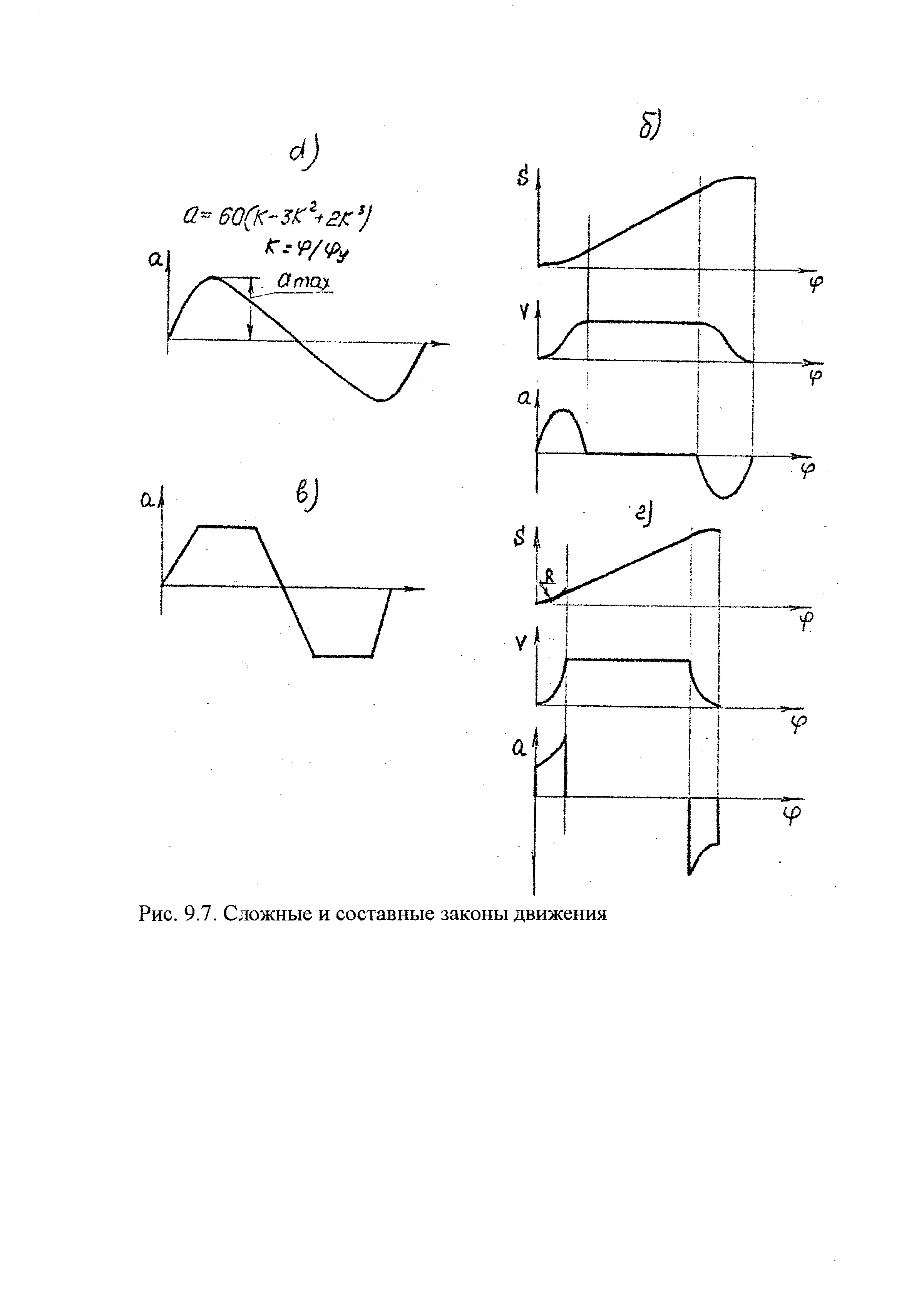
Для многих случаев машиностроительной практики простейшие законы не всегда дают удовлетворительные решения. Можно использовать сложные законы, например - наклонную синусоиду (рис. 9.7,а). Она уменьшает амплитуды скоростей и ускорений: Vmax=1,88, аmax=5,77.
Существуют и другие законы: степенные. Тира и так далее.
На рисунке 9.7, б показан трех участковый закон движения, в средней части которого V == const. Используются и составные законы (на рис. 9.7, в - безударный трапецеидальный закон). На рис. 9.7, г - закон движения с переходными кривыми, очерченными по дугам окружностей. Закон прост в изготовлении, но имеет 4 мягких удара.
Выбор закона ограничивается достижимой точностью обработки. В результате погрешностей обработанный профиль будет отличаться от теоретического. Величины отклонений зависят от допусков на обработку. Поэтому вопросы точности изготовления кулачка иногда имеют большее значение, чем выбор закона движения, так как очень часто предполагаемые преимущества того или иного закона теряются из-за недостаточной точности изготовления. С развитием станочного оборудования точность обработки увеличивается. Современные станки с ЧПУ позволяют изготавливать достаточно "тонкие" законы.