

7.21.1 Винтовая передача.
Винтовая передача составлена из колес с винтовыми зубьями (двух правых или левых).
На рис. 7.22 показаны проекции начальных цилиндров. С радиусами rW1 и rW2. В точке Р эти цилиндры касаются. Покажем скорости т. Р первого и второго колеса V1 и V2. Нормальные составляющие этих скоростей согласно теории Виллиса
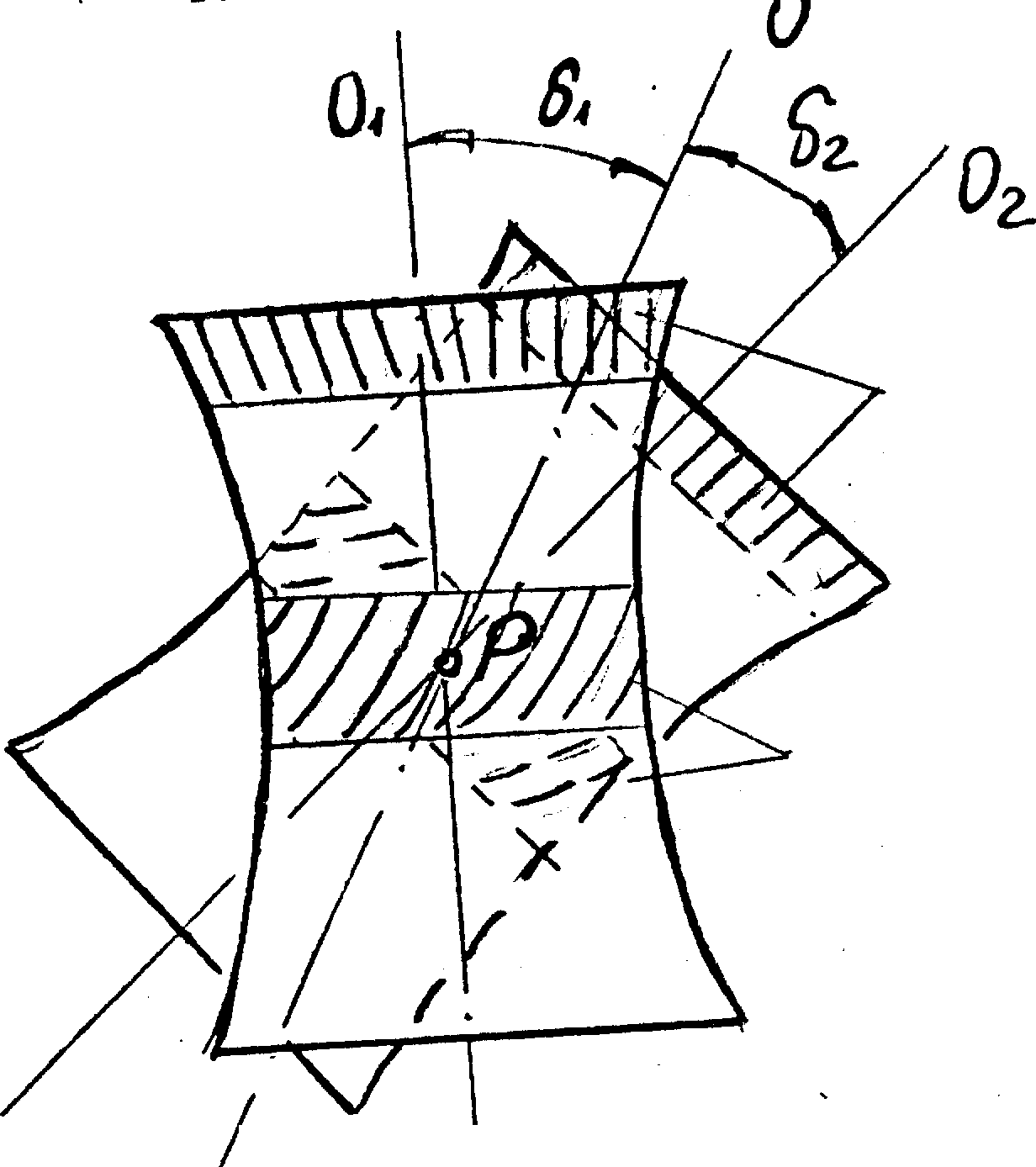
Рис. 7.21 Гиперболоид вращения
Равны
V1n= V2n, но V1n=V1cos1
V2n=V2cos2, a V1= w1rW1, V2=w2rW2
Тогда
w1 rW1sin1=w2 rW2 sin2
и передаточные отношения U12=w1/w2= rW1sin1/ rW2 sin2, т.е. передаточные отношение винтовой передачи определяются четырьмя геометрическими параметрами: 1 и 2, rW1 и rW2
Углы 1 2 можно выбирать любые, но должно соблюдаться условие 1 +2 =.
Наличие точечного контакта в зубьях приводит к повышенному износу зубьев.
Этот недостаток ограничивает применение винтовых передач в силовых механизмах. Используются главным образом в приборных передачах, авиационных двигателях, в виде ускорительных передач приводе центрифуг и сепараторов.
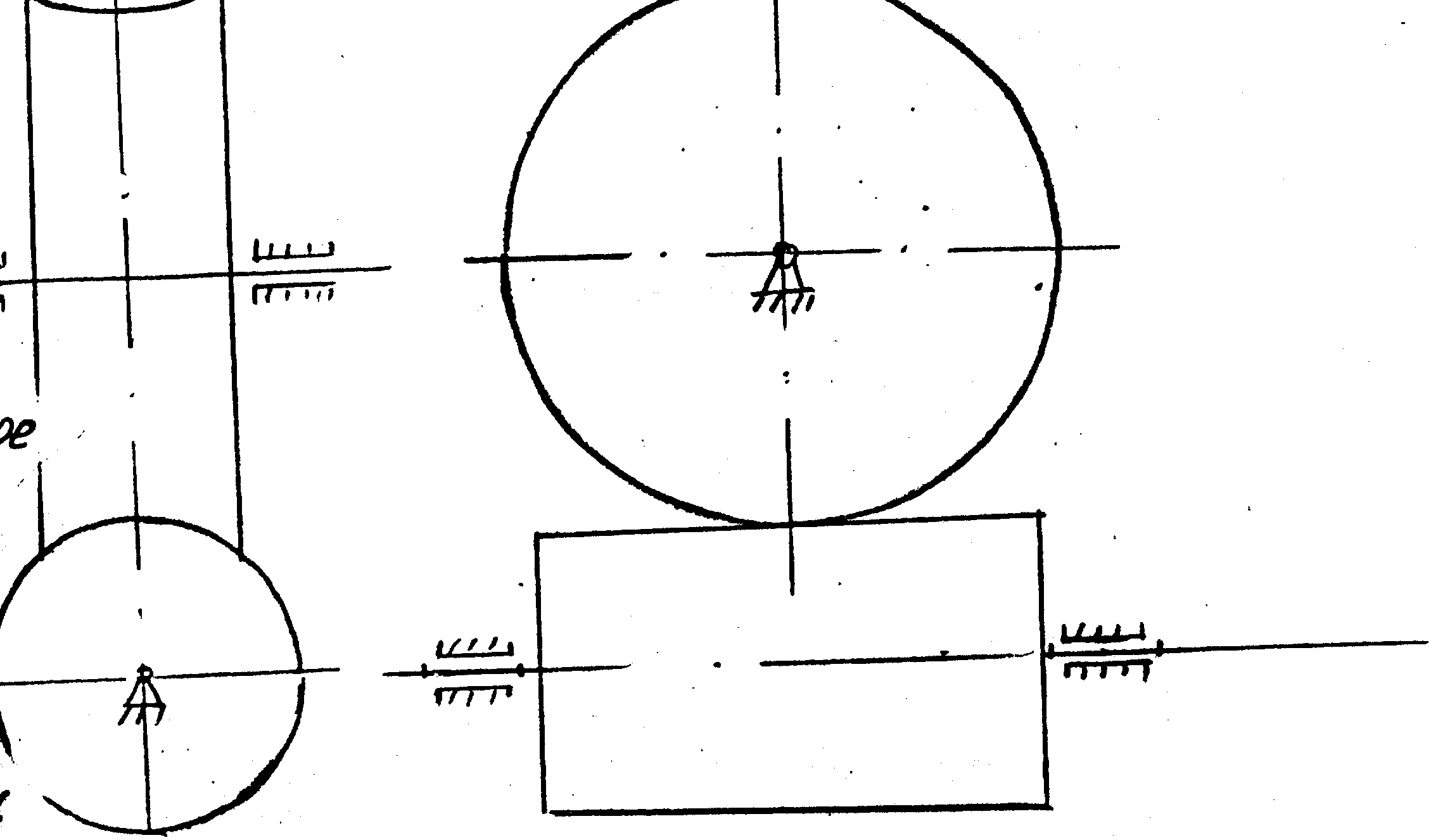
7.21.2 Червячная передача.
Червячная передача является частным случаем винтовой, когда углы 1 +2 =90. Она состоит из червяка и червячного колеса (рис.7.23).
Зубья колеса делают несколько оборотов вокруг тела червяка и называются витками. Количество витков на цилиндре называется числом захода червяка.
Червяки бывают однозаходные или многозаходные (Z4=1 ...4) на рис .7.24 показан двухзаходный червяк. Расстояние между одинаково направленными профилями одного витка называется ходом червяка Pz.
Расстояние между соседними витками называется шагом Рx. Тогда Pz=PxZ4 где Z4 -число заходов определяется по торцу червяка.
Угол (рис7.24) называется углом подъема винтовой линии. Шаг Рx= m (m-модуль).
Из развертки винтовой линии (рис7.24) имеем Pz=dtg, где d-диаметр делительной окружности червяка. Тогда dtg==mZ4 или Z4/tg=q число модулей в диаметре делительной окружности. Величина q =7. ...25 (меньше для силовых передач). Различают архимедовы ,эвольвентные и конволютные червяки
7.23 Червячная передача
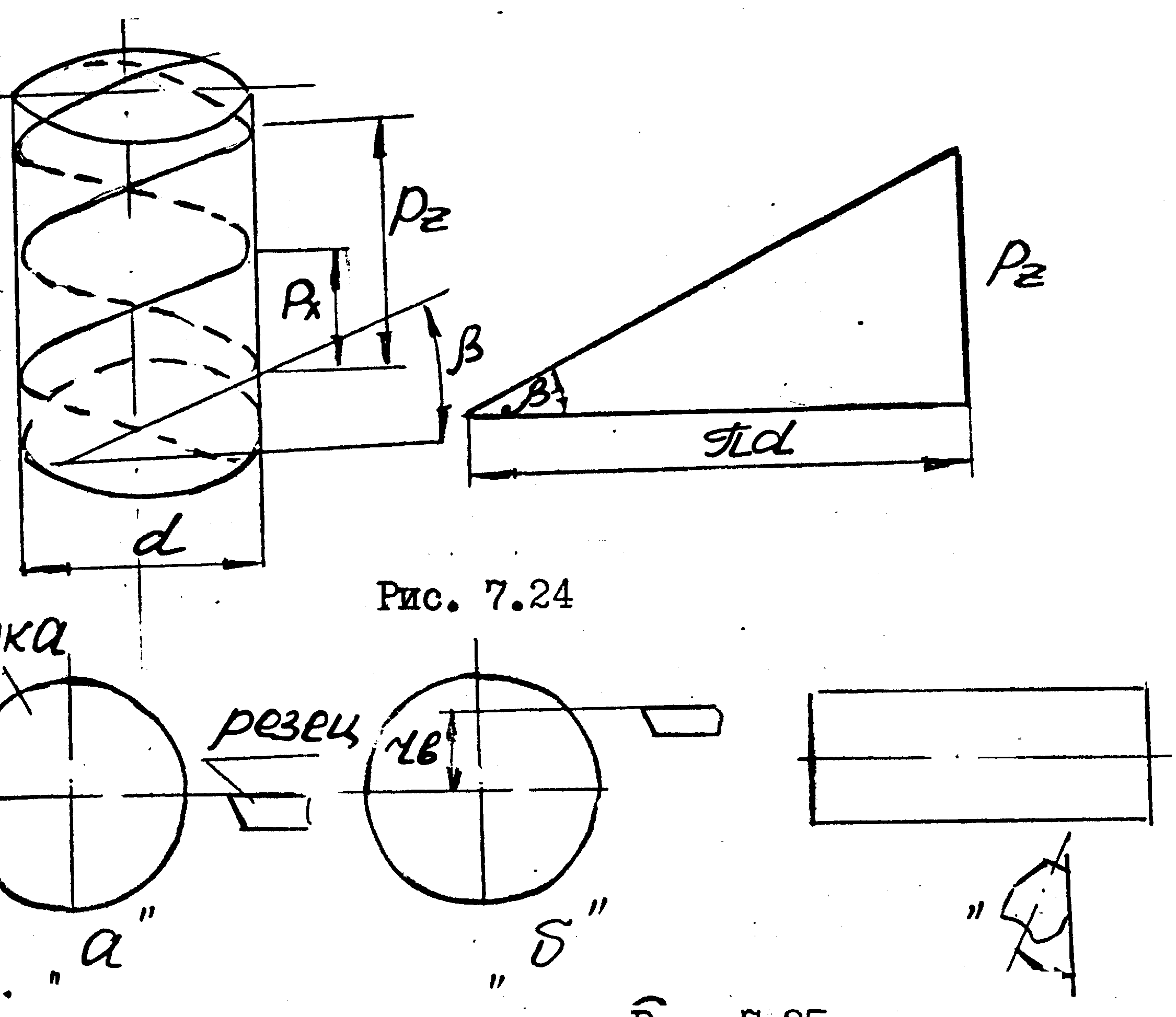
Архимедов червяк в .осевом сечении имеет трапецевидной зуб и может быть нарезан резцом, когда он находится в плоскости проходящей через ось. ( рис. 7.25).
Архимедова винтовая поверхность на плоскость не развертывается поэтому зубья такого червяка нельзя шлифовать плоским кругом. Боковая поверхность витка эвольвентного червяка представляет рентный геликоид. Эвольвентный и конвалютный червяк также нарезаются резцом, но смещенным относительно оси вращения на чину радиуса основной поверхности. (рис7 .25 )
Для нарезания конволютного червяка резец наклоняется к оси заготовки.
Эвольвентный и конволютный червяки шлифуются.
В сечении главной плоскостью, проходящей через ось червяка, перпендикулярно оси колеса. червячная передача подобна реечному зацеплению. ( рис .7.26 ). Передаточное отношение червячной передачи определяется как
U12=wч/wk=Zk/Zч
Ведущим звеном в передаче обычно является червяк. В червячной передаче, как правило движение от колеса к червяку не возможно, г.е. передача самотормозящая.
Червячное колесо нарезается с помощью червячной фрезы, идентичной червяку, за счет чего в червячной передаче обеспечивается контакт по линии.
Червячные передачи обеспечивают большое передаточное отношение (U12 500 ), отличаются плавностью, бесшумностью, большой нагрузочной способностью. Недостаток передач - низкий к.п.д (r=0,50,7) использование цветных металлов для червячного колеса.