2. 4 Аналитические методы кинематического анализа.
2. 5 Метод преобразования координат.
2.5.1 Определение положений точек в незамкнутых кинематических цепях.
2.5.2 Определение положений точек в замкнутых кинематических цепях.
2. 4. Аналитические методы кинематического анализа.
Рассмотренные ранее графические методы кинематического анализа применяются в основном при исследовании плоских механизмов, т. к. для пространственных механизмов они, базируясь на методах начертательной геометрии, теряют главное своё преимущество- простоту и наглядность.
Аналитические методы сложнее графических, но более точны и оправданы при использовании вычислительной техники.
При работе с графическими методами исследователь вручную проводит все вычисления и построения, начиная с постановки задачи и кончая получением конечного результата. При использовании аналитических методов исследователь составляет алгоритм и программирует, а все необходимые расчеты производятся на компьютере. Экономия времени при использовании аналитических методов значительная. Правильно составленные алгоритм и программа позволяют, варьируя геометрическими размерами и другими параметрами, просчитывать множество вариантов механизмов.
Кинематический анализ характеристик множества вариантов механизма необходим для решения задач синтеза. т. е. выбора оптимального варианта механизма. В данном случае количественные изменения (т. е. свойства множества вариантов механизмов) переходят в новое качество (т. е. создание оптимального варианта механизма), в чем и отражается действие объективного закона диалектики-перехода количества в качество.
Противоположные понятия, как анализ и синтез оказываются во взаимосвязи и взаимообусловленности, как и все другие категории диалектики.
Аналитические методы кинематического анализа делят на две группы:
1 Метод замкнутых векторных контуров проф. Зиновьева, который применяется в основном для исследования плоских механизмов с замкнутыми кинематическими цепями.
2. Метод преобразования координат проф. Морошкина наиболее универсален, одинаково просто используется при исследовании как плоских, так и пространственных механизмов с замкнутыми и незамкнутыми кинематическими цепями.
Оба метода несложно реализуются на компьютере.
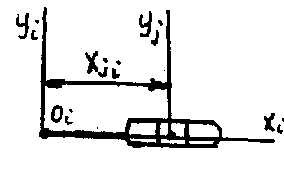
2.5 Метод преобразования координат.
Р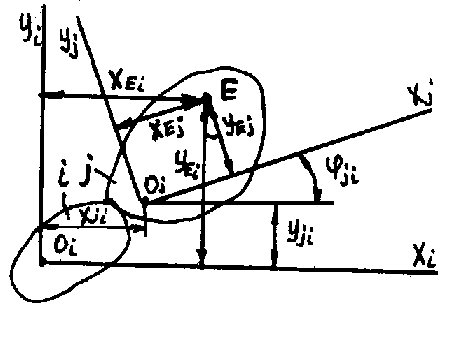 ассмотрим
движение в плоскости. Пусть имеются два
звена
ассмотрим
движение в плоскости. Пусть имеются два
звена
![]() и
и
![]() ,
с каждым из которых свяжем свою систему
координат
,
с каждым из которых свяжем свою систему
координат
![]() и
и
![]() .
Определим положение некоторой точки
Е с известными координатами
.
Определим положение некоторой точки
Е с известными координатами
![]() системы
системы
![]() в координатной
системе
в координатной
системе
![]() .Это положение
описывается уравнениями преобразования
координат следующего вида:
.Это положение
описывается уравнениями преобразования
координат следующего вида:
![]() (2.1)
(2.1)
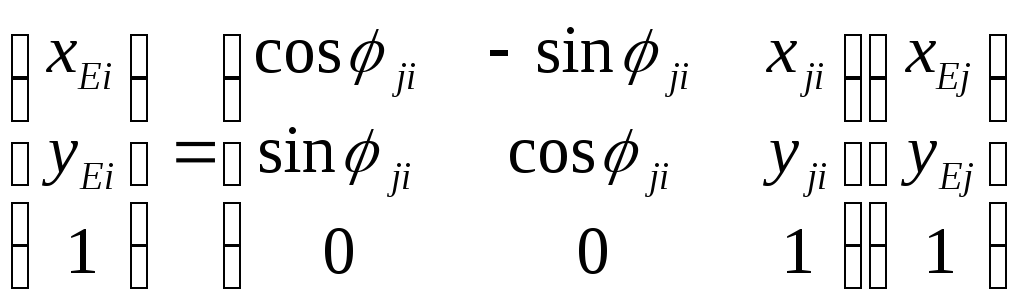
Систему
уравнений (2.1) можно записать в матричной
форме, добавив тождество 1=1.
 (2.2)
(2.2)
или
![]()
Матрицы
![]() являются
столбцами, характеризуют положение
точки Е соответственно в системе
являются
столбцами, характеризуют положение
точки Е соответственно в системе
![]() и
и
![]() .
Матрица
.
Матрица
![]() характеризует движение звена j
относительно
i.
При добавлении в эту матрицу уравнений
связи кинематической пары, являющихся
математическим выражением условий
связи, можно получить матрицу конкретной
кинематической пары.
характеризует движение звена j
относительно
i.
При добавлении в эту матрицу уравнений
связи кинематической пары, являющихся
математическим выражением условий
связи, можно получить матрицу конкретной
кинематической пары.
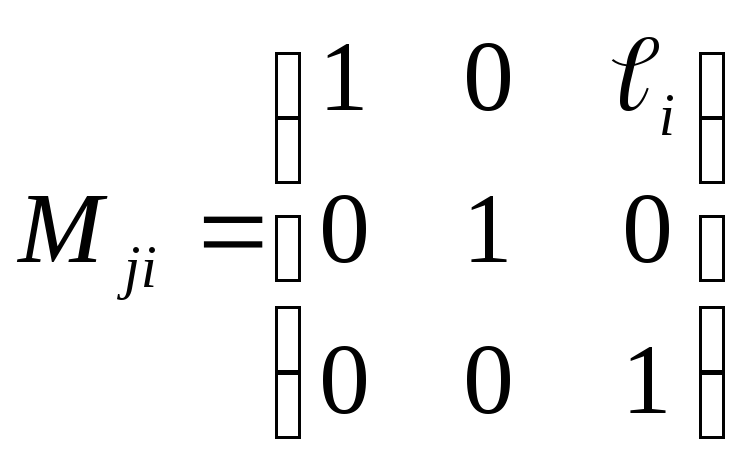
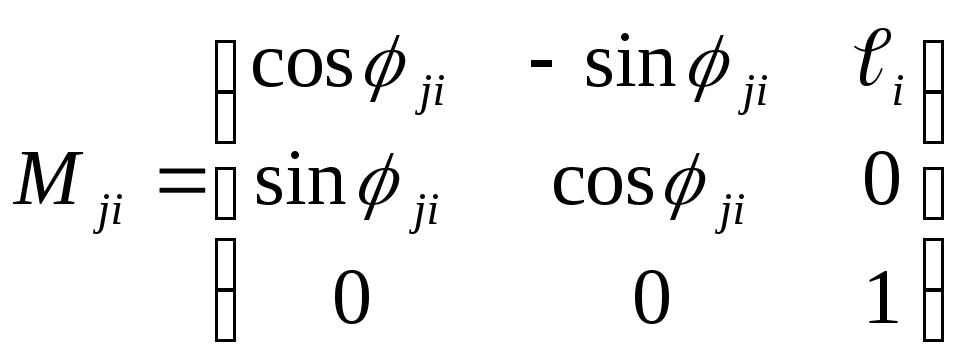
Для
вращательной и поступательной
кинематической пары 5 кл. матрицы
![]()
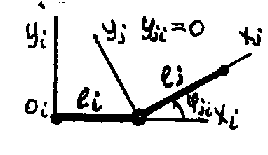
 имеют следующий вид:
имеют следующий вид:
![]()
![]()