

9.3. Рабочий объем манипулятора и классификация движений захвата
Рабочий объемом манипулятора называется объем, ограниченный поверхностью, огибающий все возможные положения захвата. Однако не все части этого объема одинаково удобны для выполнения заданных движений захвата. 3 связи с этим движения захвата подразделяются на четыре класса.
К первому классу относится движение в свободном рабочем объеме, рис. 9.4.
Движение в несвободном пространстве, рис. 9.5. при котором часть рабочего объема занята некоторым твердым телом, относится ко второму классу.
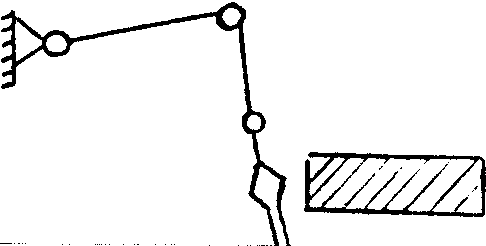
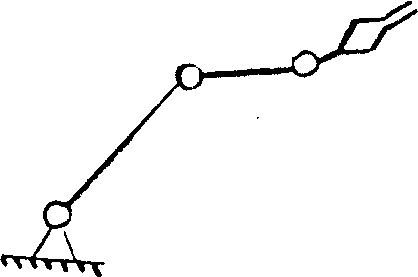
Рис. 9.4. Рис. 9.5.
К третьему классу относятся движения, согласованные со связями, наложенными не объект манипулирования, рис. 9.6, например, движения при которых точка захвата перемещается по плоско?; или пространственной кривой.
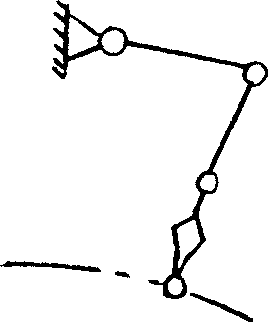
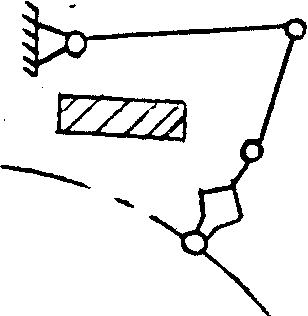
Рис. 9.6. Рис. 9.7.
Наконец к четвертому классу относятся движения, совершаемые в несвободном пространстве при несвободном объекте манипулирования, рис. 9.7.
Возможность выполнения заданных движений захвата различных классов определяется не только числом степеней свободы манипулятора, но и расположением кинематических пар.
9.4. Влияние расположения кинематических пар манипулятора на его маневренность
Под маневренностью манипулятора понимается его число степеней свободы при неподвижном захвате его звенья могут вращаться вокруг оси, проходящей через центры сферических пар. В манипуляторе по схеме рис. 9.8. при неподвижном захвате маневренность равна нулю, т.е. каждому положению захвата соответствует единственное расположение всех звеньев. Сравнение различных схем манипуляторов показывает, что маневренность зависит не только от числа степеней свободы захвата, но и от расположения кинематических пар, например, от расположения сферических пар. Повышение маневренности манипулятора позволяет выполнять движения более высоких классов и увеличивает свободу действия оператора при выполнении маневров.

Рис. 9.8.
9.5 Структурный синтез манипуляторов
Структурный синтез манипулятора, т.е. определение числа звеньев, числа кинематических пар различной подвижности и их расположения, представляет значительные трудности из-за большого число степеней свободы. Например, уже для манипулятора с тремя степенями свободы, если применять только вращательные и поступательные пары, получается восемь возможных комбинаций расположения этих пар. Поэтому при структурном синтезе манипуляторов с числом степеней свободы б и более все возможные варианты можно получить только с использованием ЭВМ.
Для сравнения этих вариантов необходимо иметь коэффициенты, определяющие их кинематические и динамические свойства, а также коэффициенты, характеризующие возможность и удобство выполнения разнообразных типовых операций, для выполнения которых предназначен манипулятор. Кинематические и динамические коэффициенты для каждого варианта схемы могут быть найдены на основании общих методов кинематического анализа механизмов.
Ниже рассмотрим некоторые геометрические коэффициенты, специфичные для манипуляторов.