

Лекция 17.
План лекции.
3.8.12 Решение уравнения движения графоаналитическим методом Виттенбауэра.
3.8.13 Определение момента инерции маховика.
3.8.14 Алгоритм определения закона движения машины и момента инерции маховика на ЭВМ.
3.8.12 Решение уравнения движения графоаналитическим методом Виттенбауэра.
Этот метод позволяет решить три задачи:
1. Определить необходимый момент движущих сил Мg для подбора двигателя и расчёта редуктора, приводящего в движение механизм.
2. Подобрать маховик (расчитать J маховика) для обеспечения заданного при проектировании коэффициента неравномерности движения .
3. Установить истинный закон движения механизма =f()
Решение всех трех задач базируется на законе сохранения энергии.
Рассмотрим случай, когда известны все внешние силы, включающие: силы сопротивления и силы тяжести. Требуется определить момент движущих сил.
По формулам приведения вычисляются значения приведенного момента сил в различных положениях механизма и строится график Mпр = f(). Путем графического интегрирования из графика Mпр = f() получают график работ сил сопротивления в пределах одного цикла движения механизма (рис.3.42).
Для установившегося движения сумма всех работ за цикл равна нулю.
A=0
Так как работа сил тяжести за цикл будет равна нулю, то равенство будет выполняться, если работа движущих сил за цикл будет равна работе сил сопротивления за цикл по абсолютной величине.
Agц=Асц (3.62)
Уравнение (3.62) является основным энергетическим уравнением установившегося режима.
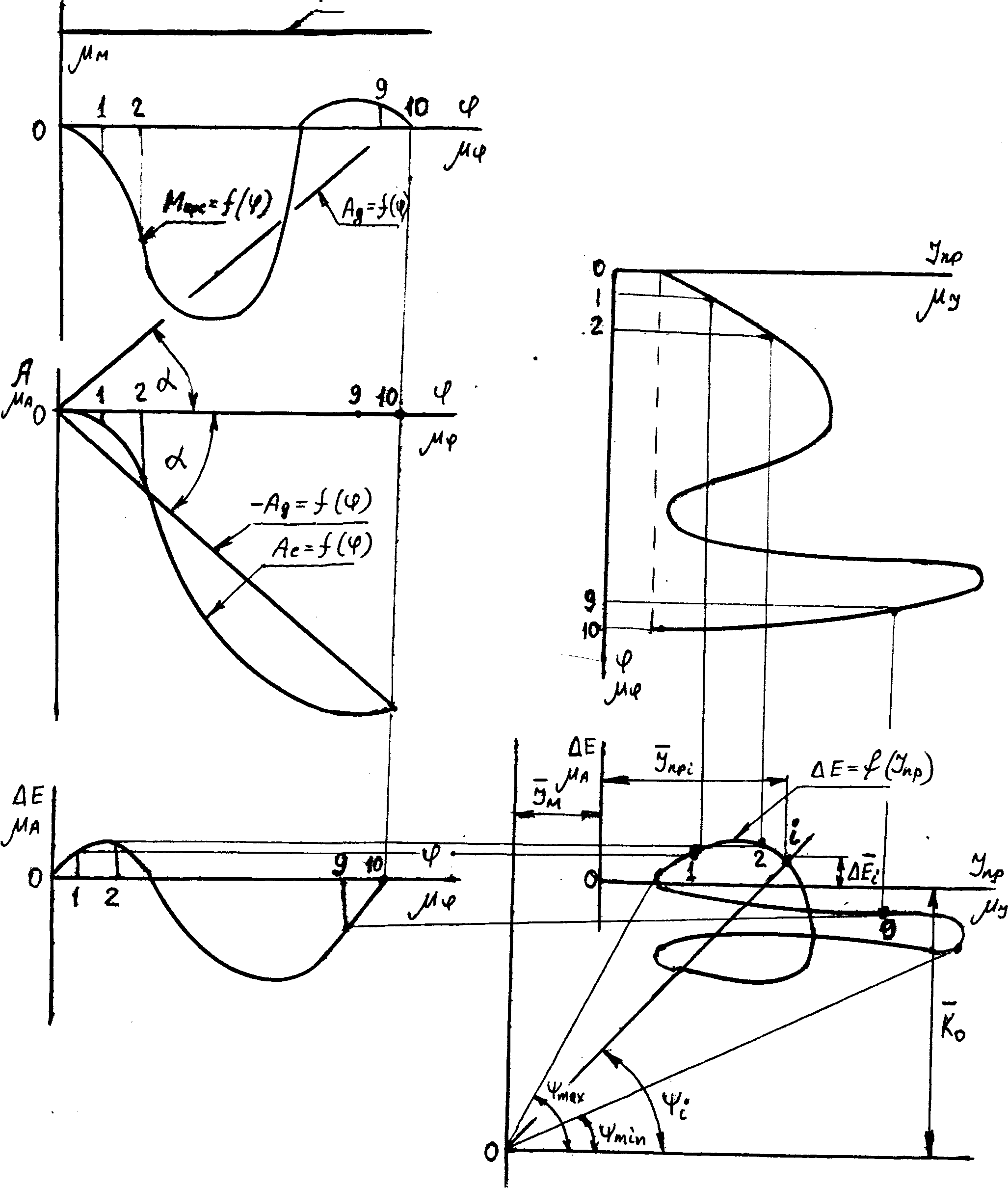
Рис 3.42 Графоаналитический метод решения уравнения движения машины,
где

Если цикл движения соответствует обороту ведущего звена, момент движущих сил является постоянной величиной, то:
Аgц=Мg2
Для установившегося движения работа сил сопротивления и работа движущих сил в начале и конце цикла должны быть равны, при необязательном равенстве внутри цикла.
А при учете того, что Мg=const, график симметричный относительно оси абсцисс графику работ сил движущих, представляет собой прямую, соединяющую начало и конец графика Аc.
Построив график Ag=f() и графически продифференцировав его, получим график момента движущих сил, необходимый для подбора двигателя и расчета редуктора.
3.8.13 Определение момента инерции маховика.
Для решения второй и третьей задач, по формулам приведения расчитаем значения приведенного момента инерции во всех положениях механизма и построим график Jпр=f().
Складывая соответствующие ординаты графиков Ag=f() и Ac=f() построим график избыточных работ E=f() по формуле
Ei=Agi+Aci
где Agi,Aci - работа движущих сил и сил сопротивления в i- положении.
Графически исключая параметр из графиков E=f() и Jпр=f() построим диаграмму E=f(Jпр) называемую диаграммой "энергия-масса" или диаграмма Виттенбауэра (рис.4.42)
Для установившегося движения диаграмма Виттенбауэра является замкнутой кривой, для переходных режимов - разомкнутой.
О
 пределим
координаты точкиi
на диаграмме E=f(Jпр)[Ei;Jпрi].
пределим
координаты точкиi
на диаграмме E=f(Jпр)[Ei;Jпрi].
Допусим известна начальная кинематическая энергия механизма К0.
Т
 огда
полное значение кинетической энергии
для этого положения
огда
полное значение кинетической энергии
для этого положения
ki=k0+i, т.к. ki=Aki, k0=Ak0, Ei=AEi
(

 гдеА
- масштабный коэффициент графика работ
А=MH)
получим:
гдеА
- масштабный коэффициент графика работ
А=MH)
получим:
ki=k0+Ei
В еличинуk0-
отложим вниз от оси абсцисс.
еличинуk0-
отложим вниз от оси абсцисс.
Для обеспечения заданного при проектировании коэффициента неравномерности в механизм введем маховик с моментом инерции JM , установив его на ведущем звене.
Тогда суммарный момент инерции механизма увеличится на JM.
Ji=JM+Jпрi
Разделив все члены этого равенства на J получим:
J




 i=JM+Jпрi
i=JM+Jпрi
Значение JM отложим влево от оси ординат. По концам отрезков К0 и JM построим новую систему координат.
Соединив прямой линией точку i с началом новой системы координат, найдем угол, который образует эта прямая с осью абсцисс (угол i).
Из
рис. 3.42
![]() (3.63)
(3.63)
Кинетическая энергия механизма с моментом инерции Ji
 (3.64)
(3.64)
Преобразуя выражение (3.64)
![]() (3.65)
(3.65)
откуда ![]() (3.66)
(3.66)
или ![]() (3.67)
(3.67)
Экстремальные значения i(max,min) и позволяют определить начало координат новой системы.
Из
условия, что
![]() и
и![]()
Находим
![]() и
и![]()
Пусть
по формуле (3.46) вручную или на компьютере
вычислены значения Mпр=f1(),
Mпрg=f2()
известен по параметрам двигателя и
редуктора. (Mпрg
- приведенный
момент движущих сил).