

Тема 2
Кинематический анализ механизмов / 10 часов/
Лекция 4
План лекции
2. 1 Основные методы кинематического анализа.
2. 2 Графический метод кинематического анализа -- метод кинематический диаграмм.
2. 2. 1 Определение положений звеньев, построение траекторий то точек и кинематических диаграмм.
2. 2. 2 Графическое дифференцирование.
2. 2. 3 Графическое интегрирование.
2. 1 Основные методы кинематического анализа.
Задачей кинематического анализа является изучение движения звеньев механизма вне зависимости от сил, действующих на них.
В результате по заданному закону движения ведущего звена определяются положения, угловые скорости и ускорения ведомых звеньев, а также перемещения, скорости, ускорения отдельных точек.
Кинематическое исследование схем механизмов производится аналитическими и графическими методами.
Аналитические методы позволяют с требуемой точностью установить аналитически функциональную зависимость кинематических параметров механизма от параметров звеньев. Эти методы отличаются сложностью и трудоемкостью. Их применение оправдывается при использовании ЭВМ. Графические методы исследования разделяются на:
1. Метод построения кинематических диаграмм.
2. Метод планов скоростей и ускорений. Метод построения кинематических диаграмм основан на графическом изображении перемещений, скоростей или ускорений отдельных точек звеньев в функции времени или перемещений ведущего звена.
Переход от графиков перемещений к графикам скоростей и ускорений производится путем графического дифференцирования, а обратно - графическим интегрированием.
Этот метод дает наглядное представление об изменении кинематических параметров во времени.
Метод планов скоростей и ускорений позволяет при наличии планов положений механизма определить скорости и ускорения любых точек механизма для любого момента времени.
2. 2 Графический метод кинематического анализа - метод кинематических диаграмм.
2. 2. 1 Определение положений звеньев, построение траекторий точек и кинематических диаграмм.
Кинематические
исследования этим методом начинаются
с построена плана механизма, т.
е. изображение
его кинематической схемы в выбранном
масштабе длины звеньев ![]() [
[![]() ],где
],где
![]() -истинный размер звена,
-истинный размер звена, ![]() -его масштабное изображение в мм.
-его масштабное изображение в мм.
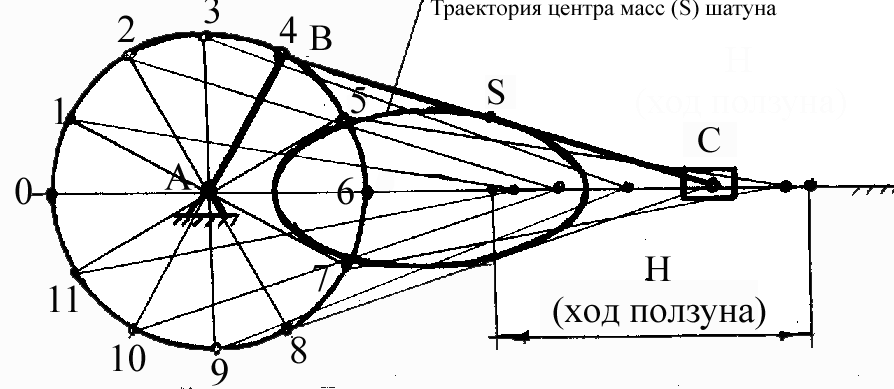
Разбив траекторию движения ведущего звена на 12 или 24 равные части можно методом засечек определить положения всех остальных звеньев в выбранные моменты времени. При построении планов положений механизма следует начинать с одного из крайних положений, ограничивающих траектории точек звеньев, совершающих возвратное движение. Например, при построении планов положений шарнирного кривошипно - шатунного механизма АВС за нулевое положение кривошипа АВ выбрано положение, когда ползун С занимает крайнее левое положение и кривошип совпадает с направлением шатуна ВС. Если из точек 1, 2, 3, и т. д. окружности радиуса ОА последовательно делать засечки радиусом АВ на траектории точки В, полученные точки соединим прямыми, то найдем ряд положений механизма. Траекторию движения интересующих точек (например, центр тяжести шатуна) построим, соединив эти точки в последовательных положениях механизма плавной кривой.
Функцию
положения ведомого звена
(ползуна)
можно
представить графически в прямоугольной
системе координат. Каждому положению
точки В через момент времени будут
соответствовать ординаты графика (рис.
2. 2
).
показывающие
перемещения точки С. Масштабный
коэффициент по оси ![]() ординат может быть выбран равным или
кратным масштабному коэффициенту
ординат может быть выбран равным или
кратным масштабному коэффициенту ![]() ,
а масштабный
коэффициент
,
а масштабный
коэффициент ![]() [
[![]() ].
Период
вращения кривошипа
].
Период
вращения кривошипа ![]()
 -
число оборотов
-
число оборотов ![]() ,
если
,
если
![]() его угловая
скорость.
его угловая
скорость.
Р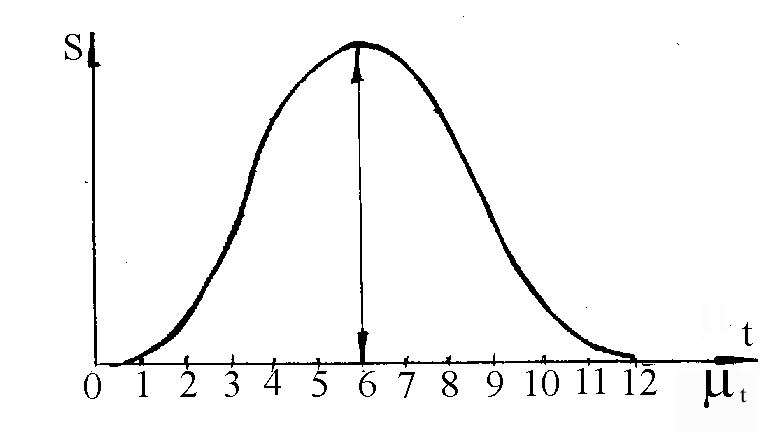 ис.2.1.
План положений кривошипно - шатунного
механизма.
ис.2.1.
План положений кривошипно - шатунного
механизма.
Р ис.2.2.
График перемещений.
ис.2.2.
График перемещений.
Рис. 2.3. К теории графического дифференцирования