

7.17 Проектирование зубчатых передач. Выбор коэффициента смещения.
Сравнивая нулевую, положительную и отрицательную зубчатые передачи следует иметь в виду,что вся технология зубонарезания для них во всех случаях одинаковая.
Нулевые передачи широко распространены, особенно, если они составлены из нулевых колес с равноделенным шагом. Они обладают денным свойством взаимозаменяемости. У равносмещенной передачи малое колесо может иметь число зубьев меньше 17.
Положительная передача обладает наибольшей изгибной и контактной прочностью и износостойкостью. Однако следует помнить, что она имеет меньший коэффициент перекрытия, и при увеличении коэффициентов смещения может наступить заострение зубьев.
Отрицательную передачу применяют реже, так как она обладает худшим эксплуатационными качествами. Необходимость в её применении возникает, когда нужно вписаться в заданное межосевое расстояние.
При
назначении коэффициентов смещения
следует помнить, что верхние пределы
увеличения суммарного и частных смещений
![]() определяются
условиями отсутствия заострения зубьев,
получения минимального допустимого
коэффициента перекрытия, а нижние
пределы определяются условиями отсутствия
заклинивания передачи и подрезания
зубьев колес.
определяются
условиями отсутствия заострения зубьев,
получения минимального допустимого
коэффициента перекрытия, а нижние
пределы определяются условиями отсутствия
заклинивания передачи и подрезания
зубьев колес.
Если по этим условиям построить кривые в координатах Х1, Х2 то получим область возможных расчетных коэффициентов смещения или блокирующий контур.
Внутри
контура нанесены линии, определяющие
другие показатели зацепления:
![]()
![]() и
и
![]() - линии, определяющие равную прочность
на изгиб. Блокирующие контуры приводятся
в справочнике Т.П.Болотовской,
И.А.Болотовского и др.
- линии, определяющие равную прочность
на изгиб. Блокирующие контуры приводятся
в справочнике Т.П.Болотовской,
И.А.Болотовского и др.
7.18 Косозубая цилиндрическая передача.
Для улучшения плавности передачи, связанной с увеличением коэффициента перекрытия, или уменьшения числа зубьев колес, изготовляетлых методом огибания стандартным инструментом, применяют косозубые колеса.

Рис. 7.17 Блокирующий контур
Боковую
поверхность косого зуба эвольвентного
колеса можно представить как линейчатую
поверхность, описываемую прямой, лежащей
в плоскости Q
под углом
![]() к образующей основного цилиндра, по
которому эта плоскость катится без
скольжения
к образующей основного цилиндра, по
которому эта плоскость катится без
скольжения![]() - угол наклона зубьев на основном
цилиндре. Каждая точка прямой в торцовых
сечениях описывает эвольвенту. Основания
эвольвент на основном цилиндре расположены
по винтовой линии. Вся поверхность
называется эвольвентным геликоидом.
- угол наклона зубьев на основном
цилиндре. Каждая точка прямой в торцовых
сечениях описывает эвольвенту. Основания
эвольвент на основном цилиндре расположены
по винтовой линии. Вся поверхность
называется эвольвентным геликоидом.
Для образования внешнего зацепления нужно взять два косозубых колеса с одинаковым утлом наклона зубьев (одно - правое, другое - левое). Во внутреннем зацеплении колёса либо оба правые, либо оба левые. В таком зацеплении зубья соприкасаются по линии, совпадающей с общей образующей геликоидов, то есть в разных сечениях участвуют разные точки эвольвентных профилей, что повышает плавность и способствует снижению шума.
Развернем делительный цилиндр на плоскость
Тогда следы зубьев на этом цилиндре изобразятся прямыми линиями. Расстояние Pt называют торцовым шагом, а расстояние Pn нормальным шагом. Они связаны зависимостью.
![]()
Соответственно различают торцовый и нормальный модули mt, mn, cвязанные соотношением
![]()
Стандартное значение имеет нормальный модуль.
В
косозубой передаче каждый зуб входит
в зацепление постепенно, не сразу всей
длиной, поэтому угол перекрытия
увеличивается на
ддобавочный
угол
![]() .
Полный угол перекрытия равен:
.
Полный угол перекрытия равен:
![]() ,
где
,
где
![]() -
угол перекрытия в торцовом сечении,
-
угол перекрытия в торцовом сечении,
![]()
b -ширина колеса,
![]() -
радиус делительного цилиндра.
-
радиус делительного цилиндра.
Соответственно увеличивается и коэффициент перекрытия.
Он определяется выражением
![]()
Здесь
![]() коэффициент перекрытия в торцовом
сечении,
коэффициент перекрытия в торцовом
сечении,
Одним из недостатков косозубых передач является наличие осевого усилия, что усложняет конструкцию опор. Этот недостаток устраняется применением шевронных колес.
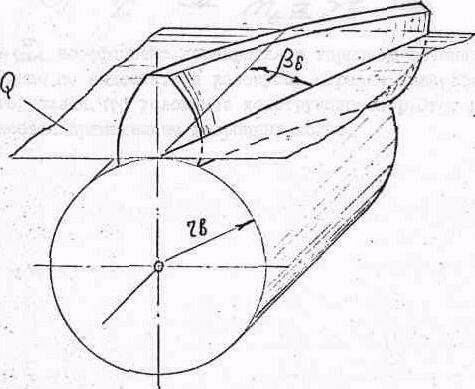
Рис. 7.18 Образование эвольвентного геликоида
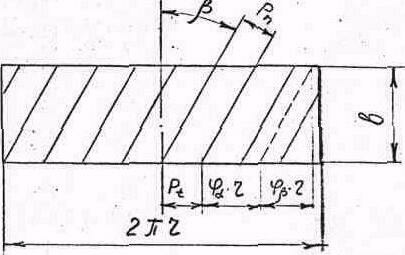
Рис. 7.19 Развертка делительного цилиндра

Рис. 7.20 Шевронное колесо