

1. 5. 7 Избыточные связи
М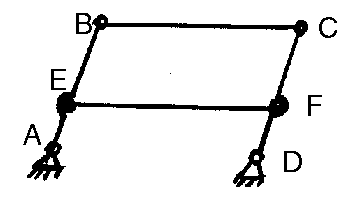 еханизмы
могут содержать т.
н. избыточные
связи, не влияющие на закон движения
механизма. Разберем на примере
механизма,
привода колес электровоза смысл
избыточной связи.
еханизмы
могут содержать т.
н. избыточные
связи, не влияющие на закон движения
механизма. Разберем на примере
механизма,
привода колес электровоза смысл
избыточной связи.
Введение в шарнирный четырехзвенник АВСД звена ЕГ с одной стороны увеличивает жесткость механизма, другой стороны, вследствие различных длин звеньев ВС и ЕГ из-за неизбежной неточности их изготовления приводит при сборке к их натягу, откуда увеличение давления на подшипники опор, быстрый износ подшипников.
Формула (I.I) получена при условии того, что в механизме нет избыточных связей. Однако при синтезе механизмов необходимо проверить наличие в них избыточных связей.
Число избыточных связей определяется по формуле:
![]()
Устранить избыточные связи можно изменением класса кинематических пар в механизме, при сохранении неизменности движения.
1. 5. 8 Классификация механизмов по общим свойствам.
Для удобства изучения структуры кинематики и динамики механизмов их классифицируют:
1) по функциональному назначению - механизмы передачи движения (редукторы, регуляторы)
2) по структурно-конструктивному признаку - зубчатые, кулачковые, рычажные, фрикционные.
3) по структурному признаку - деление механизмов на классы.
1.5.9 Виды механизмов.
Механизмы разделяются на плоские и пространственные, с низшими кинематическими парами (рычажные) и с высшими парами.
Механизмы с низшими кинематическими парами. Двухзвенные механизмы.
С вращательной парой.
 Применяются
в центрифугах, турбинах и т.
д.
Применяются
в центрифугах, турбинах и т.
д.
С поступательной парой
П![]() рименяется
в дизель - компрессорах,
суппортах.
рименяется
в дизель - компрессорах,
суппортах.
Т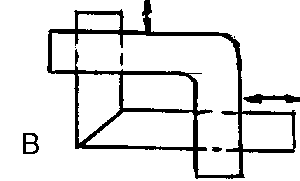
 рехзвенные
механизмы разделяются на клиновые и
винтовые
рехзвенные
механизмы разделяются на клиновые и
винтовые
применяются в прессах, сцепках вагонов в качестве слесарных тисков.
Четырехзвенные механизмы.
А
1-
кривошип
2-шатун 3-коромысло
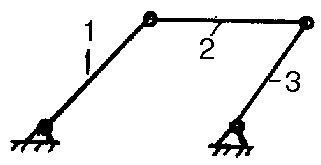
Применяется в поперечно-строгальных станках, механизмах кранов,
швейных машин и т. д.
Б) Кривошипно-ползунный механизм
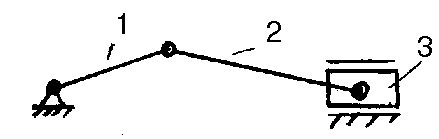
2-шатун
2-кулиса 3-ползун
Применяется
в двигателях внутреннего сгорания.
В)
Кулисный механизм 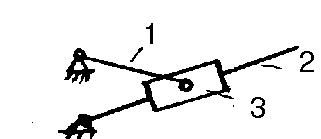
Применяется в насосах, счетных машинах и т. д.
Шестизвенные механизмы.
Большое разнообразие, различное применение этих механизмов. Они составляют основу большинства механизмов современной техники. механизмы с высшими кинематическими парами это механизмы, где элементами кинематических пар являются линия или точка. Делятся механизмы на кулачковые, зубчатые, фрикционные, храповые.
К
1-толкатель 2-кулачок
3-стойка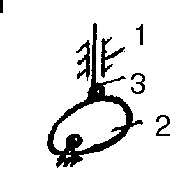
Кулачковые механизмы бывают плоские и пространственные.
Зубчатые механизмы (трехзвенные, частный случай кулачковых) Различают зубчатые передачи: цилиндрические, конические, червячные, гиперболоидные, гипоидные с внешним, внутренним, реечным зацеплением, с подвижными и неподвижными осями и т. д.
Анализ кинематических цепей позволяет сделать вывод, что для образования механизма необходимо выполнить три условия:
1) Цепь должна быть замкнутой
2) Цепь должна иметь одно неподвижное звено.
3) При заданном положении одного из звеньев остальные звенья должны занимать определенное положение, т. е. цепь должна обладать определенностью движения.
Для структурного синтеза многозвенных механизмов перебор возможных вариантов сочетания количества подвижных звеньев и кинематических пар разных классов в соответствии с формулами(1.2, 1.3) довольно затруднителен.
Более удобно находить структурные схемы путем последовательного наслоения некоторых кинематических цепей, называемых структурными группами Ассура (Ассур - русский ученый, профессор Петербургского технологического института, в 1914 году сформулировал принцип образования механизмов).