

3.8.2. Характеристика внешних сил.
Характеристикой внешней силы называется её зависимость от какого-либо кинематического параметра. Например: (см. рис.3.39).
1. Характеристика силы зависит от времени. Это имеет место в механизм перемешивающего аппарата. Сила изменяется, т.к. меняются с течением времени вязкие свойства перемешиваемой среды.
2. Характеристика силы зависит от перемещения. Наиболее распространенный случай. Так, сила упругости пружины зависит от величины её деформации S , усилие вытяжки пресса от изменения диаметра заготовки.
3. Характеристика силы зависит от скорости. Случай, характерный для демпфирующих механизмов, гребных вёсел и винта и т.д.

Рис.3.39 Зависимость силы от кинематических параметров.
Лекция 15.
План лекции.
Кинетическая энергия звеньев и работа сил, действующих в машинах.
Приведение сил и масс .Динамические модели машины.
Определение приведенных моментов инерции и моментов сил кривошипно-ползунного механизма.
Кинетическая энергия звеньев и работа сил,действующих в машине.
В движение каждое из звеньев механизма обладает определенной кинетической энергией,зависящей от массы звена и её распределения,от линейной скорости центра масс и угловой скорости звена. При определенной кинетической энергии звеньев механизма необходимо принимать во внимание характер движения звена:поступательное,вращательное или сложное.
К (3.37)
П![]()
 ри
поступательном движении , поэтому
кинетическая энергия звена
ри
поступательном движении , поэтому
кинетическая энергия звена![]()
При
вращении звена вокруг оси,совпадающей
с центром масс
![]() ,
тогда
,
тогда![]() ,а если ось
вращения смещена относительно центра
масс на расстояние rsi
,а если ось
вращения смещена относительно центра
масс на расстояние rsi
![]() ,
где
,
где
![]()
Д (3.38)

Если на звенья механизма не действуют никакие внешние силы (движущие,сопротивления) ,то K=const.
В реальных механизмах при их движениии внешние силы обязательно присутствуют (например:силы трения).
Каждая из внешних сил производит положительную или отрицательную работу, в зависимости от её направления относительно скорости точки приложения силы – кинетическая энергия при этом изменяется.
И (3.39)![]()
Где, K - текущее значение кинетической энергии механизма;
Kнач- её начальное значение;
(3.40)
![]() -
сумма всех работ всех сил и моментов
сил, приложенных к механизму.
-
сумма всех работ всех сил и моментов
сил, приложенных к механизму.
Приведение сил и масс. Динамические модели машины.
Определение закона движения механизма через уравнение (3.39) , в котором кинематические параметры звеньев находятся в определенных соотношения друг с другом, выражаемых через свои уравнения, довольно затруднительно.
Для упращения составления уравнения движения механизма и его решения ,достаточно, пользуясь методом приведения сил и масс, установить закон движения его звена или одной точки, т.е. найти только одну неизвестную функцию.
Решение этой задачи осуществляется созданием динамической модели машины, в которой модель имеет такой же закон движения как и сама машина.
Для этой модели все силы и моменты сил, действующие на машину, заменяются одной силой или моментом сил называются приведенной силой или приведенной массой.
Приведение сил и моментов сил осуществляются либо к точке (если обобщенной координатой является линейная координата ), либо к звену ( если обобщенной координатой является угловая координата ).
В качестве точки приведения обычно выбирается точка на ведущем звене, в качестве звена приведения – ведущее звено.
Если ведущее звено механизма является кривошипом, то и звено при -ведения имеет такой же вид (кривошип), если ведущее звено – ползун, то звено приведения - ползун.
Условим приведения сил и масс является закон сохранения энергии. Т.е. мощность или работа приведенной силы или момента сил должна равняться суммарной мощности или работе всех внешних сил или моментов сил, а кинетическая энергия звена приведения равна суммарной кинетической энергии всех звеньев.
![]()
(3.41)
![]()
(3.42)
Если приведенная сила Fпр , приложенная к точке направлена по касательной к её траектории ,то равенство (3.41) можно записать как
![]()
(3.43)
Где, Fi , Mi - сила и момент, приложенные к звену;
Vi - скорость точки приложения силы;
(3.44)![]() -
угловая скорость звена.
-
угловая скорость звена.
Е![]() сли
вместо приведенной силы определяется
приведенный момент сил,то аналогично
равенству (3.43)
сли
вместо приведенной силы определяется
приведенный момент сил,то аналогично
равенству (3.43)
Из уравнений (3.43) и (3.44) получим
![]()
(3.45) (3.46)![]()
Из условия (3.42)
(3.47)
Где
 для звена приведения - ползун;
для звена приведения - ползун;
![]() для
звена приведения - кривошип.
для
звена приведения - кривошип.
Подставляя соответствующие выражения в формулу (3.47)
и разрешая её относительно приведенных параметров получим:
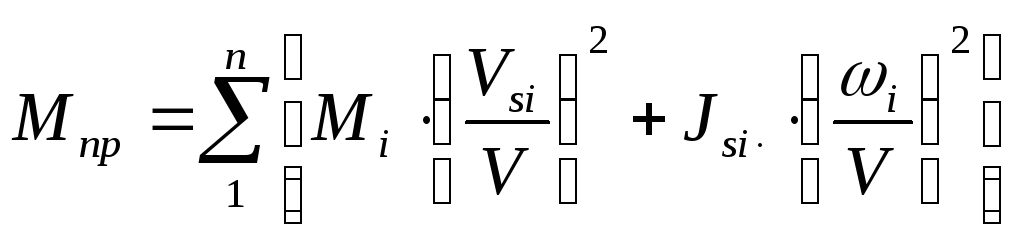
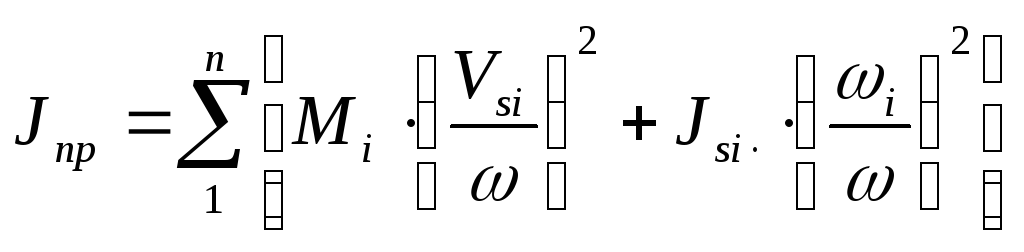
Как известно величины отношения скоростей (аналоги скоростей) зависят только от положения механизма, будучи одинаковыми при любом законе движения механизма.
Поэтому и приведенная сила или приведенный момент сил, приведенная масса или приведенный момент инерции от закона движения не зависят, а зависят от положения его звена приведения.