

9.2. Виды манипуляторов и промышленных роботов.
9.3. Рабочий объем манипулятора и классификация движений.
9.4. Влияние расположения кинематических пар манипулятора.
на его маневренность.
9.5. Структурный синтез манипуляторов.
9.6. Зоны обслуживания. Угол и коэффициент сервиса.
9.2. Виды манипуляторов и промышленных роботов.
Манипулятором называется техническое устройство, предназначенное для воспроизведения рабочих функций руки человека.
Н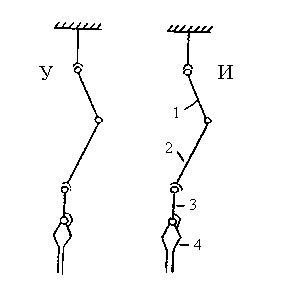 а
рис.
9.3. Показана
схема копирующего манипулятора,состоящего
из управляющего
(У) и
исполнительного (И) механизмов. Оба
механизма совершенно идентичны,
причем вследствие механической,
электрической, магнитной или какой-либо
другой связи движение звеньев
исполнительного повторяют (копируют)
движения
а
рис.
9.3. Показана
схема копирующего манипулятора,состоящего
из управляющего
(У) и
исполнительного (И) механизмов. Оба
механизма совершенно идентичны,
причем вследствие механической,
электрической, магнитной или какой-либо
другой связи движение звеньев
исполнительного повторяют (копируют)
движения
Рис 9.3
звеньев управляющего механизма.
Как видно из схемы, механизм манипулятора образован из пространственной незамкнутой кинематической цепи. Звенья этой цепи по аналогии с рукой человека имеют следующие названия:
О - корпус; I - плечо, 2 - предплечье; 3 - кисть или захват; 4 - палец.
Кинематическая пара, образованная плечом и корпусом, или кинематическое соединение, заменяющее эту пару, называется плечевым суставом; кинематическая пара, образованная плечом и предплечье - локтевым суставом; кинематическая пара, образованная кистью и предплечьем - кистевым суставом.
Звено 4 (палец) при рассмотрении структуры, кинематики и динамики манипулятора объединятся со звеном 3. Поэтому считаем, что кинематическая цепь манипулятора состоит из стойкости (корпуса) и трех подвижных звеньев. Плечевой и кистевой суставы выполнены как сферические пары, а локтевой сустав - как касательная пара.
Следовательно, рассматриваемый манипулятор имеет семь степеней свободы, так как число степеней свободы незамкнутой кинематической цепи равно сумме подвижностей кинематических пар. Захват может в этом манипуляторе занять любое положение в пространстве в пределах, определяемых конструктивными размерами звеньев. В дальнейшем появились манипуляторы с большим числом звеньев и кинематических пар и внешнее сходство с рукой человека стало утрачиваться, но во всех вариантах сохранилось назначение манипулятора - воспроизводить пространственные движения, подобные движениям рук человека. Копирующие манипуляторы применяются теперь во многих областях механики для выполнения операций в условиях, исключающих возможность присутствия человека возле обрабатываемого или перемещаемого изделия (радиоактивность, вакуум, высокая температура, повышенное давление, вредное химическое производство и т.д.). В зависимости от вида системы управления различают манипуляторы с автоматическим управлением и манипуляторы с ручным управлением.
Промышленные роботы
Манипуляторы с автоматическим управлением могут использоваться не только для работы во вредных условиях, но и для механизации однообразных и утомительных работ на быстродействующих конвейерах, операциях по перестановке деталей, упаковке деталей и т. д.. В этих случаях манипуляторы с автоматическим управлением называются обычно промышленными роботами.
Структура и геометрия манипуляторов
Структура кинематических цепей манипуляторов довольно разнообразна. Манипуляторы отличаются числом звеньев, видами и расположением кинематических пар различной подвижности, числом степеней свободы.