5.3 Синтез четырехзвенного кривошипно-коромыслового механизма по двум крайним положениям коромысла, коэффициенту изменения средней скорости и допускаемому углу давления.
Пусть в задание на проектирование заданы:
-
Угол
![]() между крайними положениями коромысла
между крайними положениями коромысла
коэффициент изменения средней скорости К
допустимый угол давления v, длина звена l3.
Требуется определить положения неподвижных шарниров А и Д и размеры, звеньев l1, l2.
Перед решением этой задачи рассмотрим смысл параметров, определяемых в задании на проектирование.
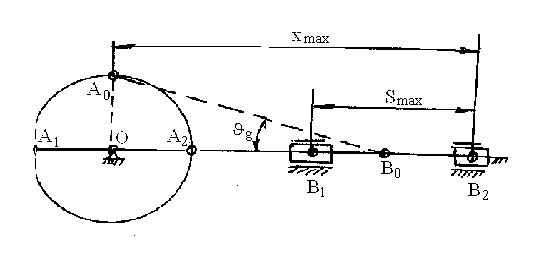
1. В качестве основного условия синтеза механизма должен быть выбран коэффициент изменения средней скорости К, который равен отношению средних угловых скоростей коромысла за время его движения в прямом и обратном направлениях.
Принятие коэффициента К за основное условие синтеза обусловлено тем, что он определяет характер движения выходного рабочего звена. Например, в строгальных и долбежных станках обработку изделия производят в одном направлении с заданной скоростью, а холостой /обратный/ ход его осуществляется с большей скоростью. Величиной характеризующей этот процесс и является коэффициент К.

Из
рис. 5.3
![]()
![]()
2.Допустимый угол давления Vд обычно выбирается в качестве, дополнительного условия синтеза (V<Vд).
Угол давления V - это угол между направлением вектора абсолютной скорости некоторой точки и вектором усилия, приложенного в этой точке. Угол давления характеризует условия статической передачи усилия. С увеличением V увеличивается трение в кинематических парах, снижается КПД механизма, а в некоторых случаях приводит к заклиниванию. Поэтому, механизм должен быть спроектирован так, чтобы реальные углы давления не превышали некоторые допустимые значения.
3. Угол размаха коромысла и его длина обычно задается конструктивно, исходя из условия обеспечения минимальных габаритов механизма при требуемой величине рабочего хода.

Рис.5.3 Синтез механизма по двум крайним положениям коромысла.
Изобразим механизм, вида рис.5.1 в крайних положениях коромысла /рис.5. 3 /.
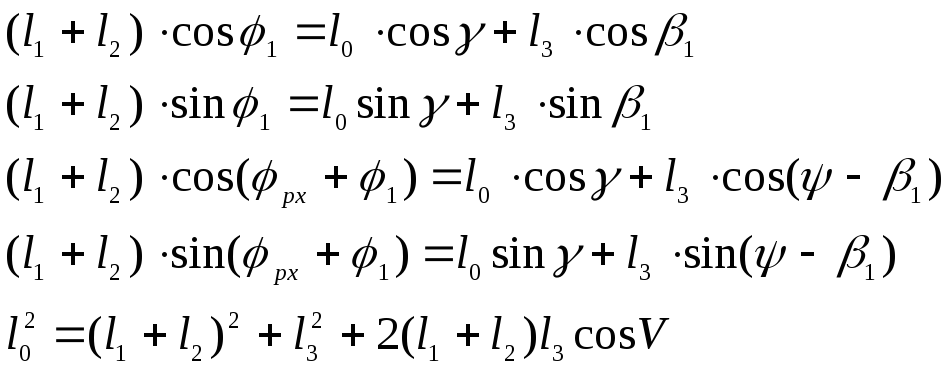
Проекции векторных контуров на координатные оси дадут две системы уравнений.
Для первого положения /контур АВ1С1Д/
![]()
или
![]() (5.4)
(5.4)
Так
как
![]()
Для второго положения /контур АВ2С2Д/
![]() (5.5)
(5.5)
Так
как
![]() то из (5.5) при
то из (5.5) при
![]()
![]() (5.6)
(5.6)
В
системах уравнений (5.5) и (5.6) неизвестными
являются
![]() всего пять
параметров.
Для решения этих систем уравнений
добавим к ним еще одно. Из рассмотрение
контура АВ1С1Д
всего пять
параметров.
Для решения этих систем уравнений
добавим к ним еще одно. Из рассмотрение
контура АВ1С1Д
![]()
Тогда в окончательном виде можно записать
Указанная система уравнений является нелинейной. Для ее решения можно воспользоваться стандартной подпрограммой библиотеки математического приложения.
ЛЕКЦИЯ 22
План лекции
Графоаналитические методы синтеза рычажных механизмов.
5.4.1 Синтез кривошипно-коромыслового механизма.
5.4.2 Синтез кривошипно-ползунного механизма.
5.4.3 Синтез кулисного механизма.
5.4.l Синтез кривошипно-коромыслового механизма.
Для механизма, изображенного на рис 5.4 заданы: длина коромысла ВС и расстояние между центрами коромысла и кривошипа ОС. Известны крайние положения коромысла, расположенные симметрично относительно направления, перпендикулярного линии центров ОС. Требуется определить длины кривошипа ОА и шатуна АВ.
Для определения длины кривошипа соединим крайние положения точки В с центром шарнира 0. Искомая длина ОА и АВ определится из соотношения:
ОВ1=ОА+АВ
ОВ2=АВ-ОА
Откуда
ОА=(ОВ1-ОВ2)/2
Если при заданном расстоянии ОС положение точки 0 относительно коромысла неизвесно, его можно выбрать произвольно, зная длину АВ.
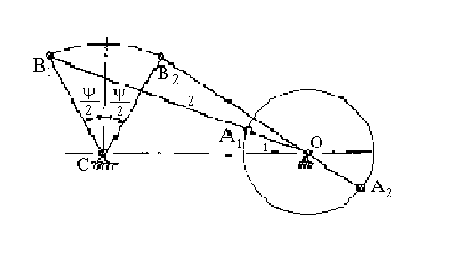
Рис 5.4 Синтез механизма по заданным размерам: ВС,ОС
и углу
Если для того же механизма заданы положения коромысла и коэффициент изменения средней скорости К, то недостающие размеры звеньев определяются положениями точек 0 и А /рис .5.5/
Положение точки 0 определяется значением угла /формула 5.4/. Точка 0 лежит на дуге В1NВ2 окружности, являющейся геометрическим местом вершин угла , опирающегося на дугу В1В2 .
Центр этой окружности /точка Д/ находится на середине гипотенузы прямоугольного треугольника В1NВ2 построенного на хорде В1В2 .
Положение точки 0 на дуге окружности В1В2 может быть ограничено лишь значением угла давления в крайних положениях.
Если задан угол g, то центр 0 следует выбирать на дугах В1К1 либо В2К2 .Точки К1 и К2 определятся, если к направлениям коромысла в крайних положениях провести лучи под углом =900-g так, как это показано на рис.5.5.
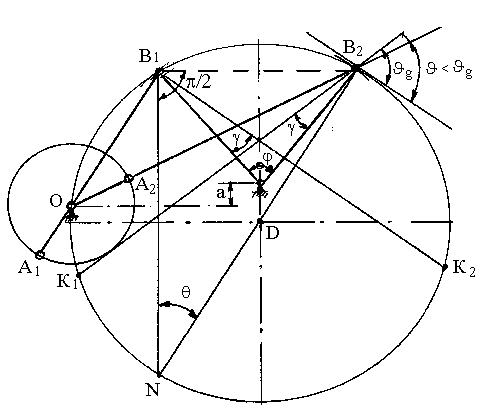
Рис 5.5 Синтез механизма по заданным: положению коромысла и коэффициенту К.
Данная задача имеет множество решений, если не задана длина одного из звеньев.
Например, если задана длина ОС, из центра С на дуге В1В2 окружности следует сделать засечки радиусом ОС и, таким образом, определить положение точки О.