

9.6 Зоны обслуживания, угол и коэффициент
сервиса
Зоной обслуживания (рабочей зоной) называется часть рабочего объема манипулятора, в которой можно выполнять данную характеризуемую расположением захвата по отношению к объекту манипулирования операцию. Для каждой точки рабочего объема манипулирования операцию. Для каждой точки рабочего объема манипулятора можно определить некоторый телесный угол , внутри которого захват можно подвести к этой точке.
Телесный угол - часть пространства, ограниченная прямыми, проведенными из одной точки (вершины) ко всем точкам какой-либо замкнутой кривой. Мерой телесного угла является площадь, вырезываемая телесным углом на сфере единичного радиуса с центром в вершине. Максимальное значение телесного угла равно Этот угол называется углом сервиса. Отношение называется коэффициентом сервиса в данной точке.
Значение
этого коэффициента может меняться от
0 на границе
рабочего объема до
1 для точек
зоны полного сервиса. Качество манипулятора
в отношении возможностей выполнения
различных операций оценивается средней
величиной коэффициента сервиса ср
в рабочем объеме
V :к оторый
называется полным коэффициентом сервиса
манипулятора. Определение коэффициента
сервиса по методу объемов.
оторый
называется полным коэффициентом сервиса
манипулятора. Определение коэффициента
сервиса по методу объемов.
Определение
коэффициента сервиса в данной точке
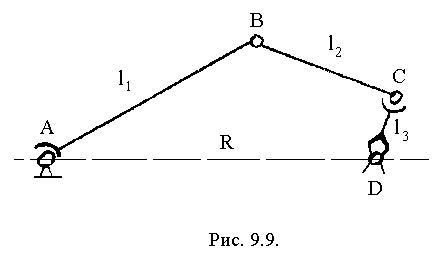
пространства покажем на примере
манипулятора с двумя сферическими и
одной вращательной парами (рис.9.9)
для случая, когда захвачен некоторый
объект пренебрежимо малых размеров,
находящийся в выбранной точке D.
В этом случае захват может вращаться
вокруг точки
D
и угол сервиса
![]() определится как телесный угол, захваченный
между всеми возможными положениями
отрезкаCD
(пренебрегая толщиной захвата). Для
определения угла сервиса в выбранной
точке представим манипулятор как
пространственный четырехзвенный
механизм с одной вращательной парой В
и тремя сферическими парами A, C, D
. Точки A,
B, C этого механизма лежат в одной
плоскости, перпендикулярной оси
вращательной пары.То положение этой
плоскости, которое проходит через
отрезок CD
называется базовой плоскостью.
определится как телесный угол, захваченный
между всеми возможными положениями
отрезкаCD
(пренебрегая толщиной захвата). Для
определения угла сервиса в выбранной
точке представим манипулятор как
пространственный четырехзвенный
механизм с одной вращательной парой В
и тремя сферическими парами A, C, D
. Точки A,
B, C этого механизма лежат в одной
плоскости, перпендикулярной оси
вращательной пары.То положение этой
плоскости, которое проходит через
отрезок CD
называется базовой плоскостью.
 В
базовой плоскости механизма может
рассматриваться как плоский шарнирный
четырехзвенник ABCD.
Этот четырехзвенник может вращаться
относительно сферических пар А и
D.
Поэтому для определения возможных
положений отрезка СD
можно сперва найти его положения в
плоском четырехзвеннике, а затем
вращать весь четырехзвенник относительно
прямой AD.
Кроме того, в пространственном механизме
возможно вращение звеньев АВ и ВС
относительно оси, проходящей через
центры сферических пар А и С. Но это
вращение не оказывает влияния на
положение оси захвата CD
и поэтому в дальнейшем не рассматривается
(это вращение соответствует одной
степени маневренности).
В
базовой плоскости механизма может
рассматриваться как плоский шарнирный
четырехзвенник ABCD.
Этот четырехзвенник может вращаться
относительно сферических пар А и
D.
Поэтому для определения возможных
положений отрезка СD
можно сперва найти его положения в
плоском четырехзвеннике, а затем
вращать весь четырехзвенник относительно
прямой AD.
Кроме того, в пространственном механизме
возможно вращение звеньев АВ и ВС
относительно оси, проходящей через
центры сферических пар А и С. Но это
вращение не оказывает влияния на
положение оси захвата CD
и поэтому в дальнейшем не рассматривается
(это вращение соответствует одной
степени маневренности).
Для
того, чтобы коэффициент сервиса Q
был равен единице, угол сервиса
![]() должен быть равен 4П,т.е.
точка С должна иметь возможность занять
любое положение на сфере радиуса CD
с центром в точке D.
Это условие выполняется, если в плоском
четырехзвеннике звено CD
может совершать полный оборот, т.е.
является кривошипом. Следовательно,
коэффициент сервиса равна
I в той зоне
обслуживания, для которой переменное
расстояние между точками A и D, обозначенное
через R,
и постоянными
длины l1=
AB,
l2=
BC,
l3=
CD
удовлетворяют условию существования
кривошипа в шарнирном четырехзвеннике.
должен быть равен 4П,т.е.
точка С должна иметь возможность занять
любое положение на сфере радиуса CD
с центром в точке D.
Это условие выполняется, если в плоском
четырехзвеннике звено CD
может совершать полный оборот, т.е.
является кривошипом. Следовательно,
коэффициент сервиса равна
I в той зоне
обслуживания, для которой переменное
расстояние между точками A и D, обозначенное
через R,
и постоянными
длины l1=
AB,
l2=
BC,
l3=
CD
удовлетворяют условию существования
кривошипа в шарнирном четырехзвеннике.
В рассматриваемой конструкции манипулятора звено АB не совершает полного оборота, т.е. в плоском четырехзвеннике звено АВ - коромысло. Поэтому задача об определении зоны обслуживания, в которой коэффициент сервиса Q равен I, свелась к определению длины стойки R кривошипно-коромыслового механизма по условию существования кривошипа.
В кривошипно-коромысловом механизме кривошип (l3) всегда наименьшее звено. Наибольшим звеном может быть или стойке (R), или коромысло (l1), или шатун (l2). Для существования кривошипа сумма длин наибольшего и наименьшего звеньев должна быть равна или меньше суммы длин двух других звеньев. Отсюда получаем три возможных условия существования кривошипа в кривошипно-коромысловом механизм
R+l3![]() l1+
l2
(I)
l1+
l2
(I)
l1+l3![]() R+ l3
(II)
R+ l3
(II)
l2+
l3![]() R+
l1
(III)
R+
l1
(III)
Из условия (I) получаем максимальную длину стойки, удовлетворяющую условию существования кривошипа:
Rmax= l1+ l2- l3
Из условий (2) и (3) находим минимальную длину стойки:
Rmin= l1- l2+ l3
 Следовательно,
допускаемая область расположения точки
D на базовой плоскости располагается
между окружностями радиусов Rmax
и Rmin
с центром в точке А.
Следовательно,
допускаемая область расположения точки
D на базовой плоскости располагается
между окружностями радиусов Rmax
и Rmin
с центром в точке А.
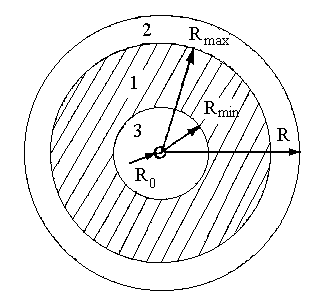
Рис.9.10.
На рис. 9.10 эта область обозначена цифрой I. Увеличивая длину R сверх Rmax получаем двухкоромысловый механизм, в котором звено CD совершает лишь часть оборота вокруг центра D и соответственно точка С располагается лишь на части сферы радиуса СD (Q<1).Увеличивать длину R можно до значения R1=l1+l2+l3
при котором все звенья манипулятора, вытягиваются в одну линию и коэффициент сервиса Q равен нулю. Зона обслуживания, расположенная между окружностями Rmax и Rmin обозначена цифрой 2.
Уменьшать величину R можно до величины R0= l1- l2- l3. Зона обслуживания,
расположенная между окружностями Rmin и R0 обозначена цифрой 3. Указанные зоны обслуживания соответствуют плоскому манипулятору. Для получения зоны обслуживания рассматриваемого пространственного манипулятора надо вращать плоский четырехзвенник относительно отрезка AD. Тогда для зоны I получаем шар, а для зоны 2 (или зоны 3) - шаровой сектор, сферическая поверхность которого определяется выражением:
г де
де
![]() max
-
максимальный угол, отсчитываемый от
оси AD, в пределах которого может
повернуться звено CD при данном значении
R
.
Угол
max
-
максимальный угол, отсчитываемый от
оси AD, в пределах которого может
повернуться звено CD при данном значении
R
.
Угол
![]() max
находится
из соотношения:
max
находится
из соотношения:
г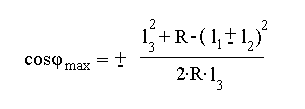 де
верхние знаки
- для зоны
2 (рис.
9.II),
а нижние
- для зоны
3 (рис.
9.I2).
де
верхние знаки
- для зоны
2 (рис.
9.II),
а нижние
- для зоны
3 (рис.
9.I2).
Для
зоны
1 угол
![]() max=
П
max=
П
Из
определения телесного угла следует,
что угол сервиса
![]() = F
/ l32.
= F
/ l32.
П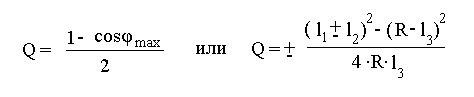 одставляя
одставляя
![]() в формулу Q=
в формулу Q=![]() / 4П и учитывая формулу для F=
2 П l32(1-cos
/ 4П и учитывая формулу для F=
2 П l32(1-cos![]() max)
получаем искомый коэффициент сервиса
для данного значения R
:
max)
получаем искомый коэффициент сервиса
для данного значения R
:
где верхние знаки - для зоны 2, а нижние - для зоны 3. Для зоны 1 коэффициент сервиса Q = 1.
о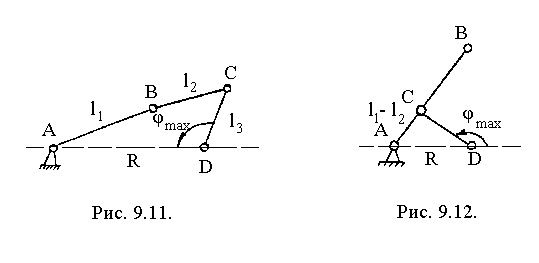 лученная
формула дляQ
действительна при отсутствии
конструктивных ограничений на
относительные перемещения звеньев в
кинематических парах. С учетом этих
ограничений формулы для определения
коэффициента сервиса усложняются, но
и в каждом конкретном случае могут быть
получены с использованием методов
определения положений звеньев
пространственных механизмов. Эти
формулы используются для сравнения
различных манипуляторов.
лученная
формула дляQ
действительна при отсутствии
конструктивных ограничений на
относительные перемещения звеньев в
кинематических парах. С учетом этих
ограничений формулы для определения
коэффициента сервиса усложняются, но
и в каждом конкретном случае могут быть
получены с использованием методов
определения положений звеньев
пространственных механизмов. Эти
формулы используются для сравнения
различных манипуляторов.