

План лекции
1,5 Структурный синтез механизмов.
1.5.1 Структура механизмов.
1.5.2 Классификация кинематических пар по числу связей.
1.5.3 Степень подвижности кинематической цепи.
1.5.4 Классификация кинематических цепей.
1,5 Структурный синтез механизмов.
Любая рабочая транспортная, загрузочная и т. д. машина состоит из механизмов. Механизм-это механическая система тел, предназначенных для преобразования движения одного или нескольких тел в требуемое движение других тел.
Механизм состоит из звеньев, соединенных между собой определенным образом.
Звеном называется одно или несколько жестко соединенных твердых тел входящих в состав механизма. Например: звеном является шатун механизма двигателя внутреннего сгорания рис. 1. 1., т. к. все детали (их четыре) жестко соединены между собой.
Рис.I.I Звено, состоящее из нескольких деталей
Звенья разделяются на подвижные и неподвижные, жесткие, упругие (пружины), гибкие, жидкие, входные, выходные, промежуточные. ВСЕ неподвижные детали, входящие в состав одного механизма, называются неподвижным звеном или стойкой. Например: В механизме шарнирного четырехзвенника имеются: три подвижных звена (кривошип, шатун, коромысло) и одно неподвижное звено (стойка). Все звенья жесткие.
Входным звеном (ведущим) называется звено, которому сообщается движение, преобразуемое механизмом в требуемое движение выходных звеньев.
Выходным звеном называется звено, совершающее движение, для выполнения которого предназначен механизм.
Остальные звенья называются промежуточными. Два звена могут соединяться друг с другом с помощью кинематических пар. Кинематической парой называется подвижное соединение двух соприкасающихся звеньев.
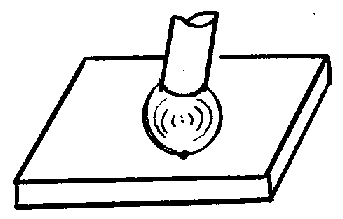
Звенья могут соприкасаться: по точке, линии, поверхности, которые называются элементами кинематической пары. Если элементом является линия или точка, то такая кинематическая пара называется высшей, если элементом является поверхность-то низшей кинематической парой. Примеры высших и низших кинематических пар приведены рис. 1. 2. Низшие пары обладают свойством обратимости, т. е. вид траектории точек звеньев в их относительном движении одинаков.
Высшие кинематические пары
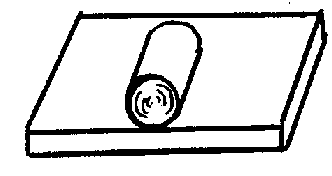
Элемент
- точка
элемент
- линия
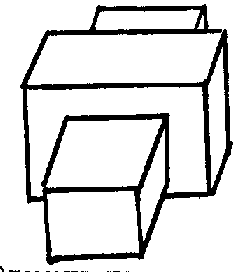
Низшие
кинематические пары Элемент
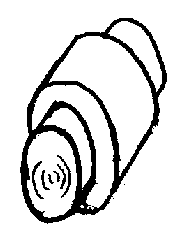
- плоская поверхность элемент-цилиндрическая
поверхность
Рис 1.2 Виды
кинематических пар
геометрическое силовое
Рис 1.3 Виды
замыканий в кинематических парах
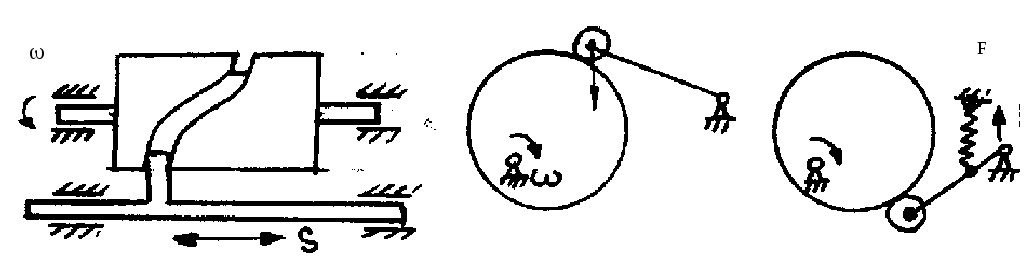
У низших пар возможно только скольжение элементов, у высших - скольжение и качение. Чтобы сохранить постоянный контакт звеньев в кинематических парах необходимо выполнить условие замыкания. Замыкание может быть геометрическим и силовым.
Геометрическое замыкание осуществляется конструктивной формой элементов кинематической пары, например охват толкателя кулачковым барабаном ( рис. 1. 3).
Силовое замыкание обычно осуществляется в высших парах силами тяжести или пружины.
Прочность и износостойкость в низших кинематических парах значительно выше, т. к. там меньше удельное давление, меньшие контактные напряжения. Низшие кинематические пары допускают большую нагрузку. Однако высшие кинематические пары могут осуществлять требуемые движения с меньшим числом звеньев. Поэтому механизмы с высшими кинематическими парами меньше по габариту и весу.