

3.7.4 Статическая и динамическая балансировка вращающихся масс.
Деталь, правильно спроектированная с точки зрения уравновешенности, может оказаться неуравновешенной вследствие неоднородности материала, неточности изготовления. Поэтому все быстровращающиеся детали подвергают опытному уравновешиванию на специальной машине. Такое опытное уравновешивание называется балансировкой. Она может быть статической и динамической.
Статическая балансировка выполняется на специальных призмах, расположенных параллельно, на которые помещается уравновешиваемая деталь или на пружинных весах (рис. 35).
В первом случае, когда центр масс смещен относительно оси, то деталь поворачивается пока центр масс не займет самое низкое положение. Добавлением масс предварительное крепление с помощью (пластилина) или удалением масс (высверливание) добиваются безразличного равновесия детали на призмах при любом ее повороте.
Во втором случае, балансируемую деталь помещают в опорах пружинного .рычага и поворачивают. По размаху рычага на шкале судят о величине и месте неуравновешенности.
При
тщательной балансировке можно добиться
смещения центра масс не менее
0,05 мм, Как
правило, статической балансировке
подвергаются детали плоские и вращающиеся
с малыми угловыми скоростями.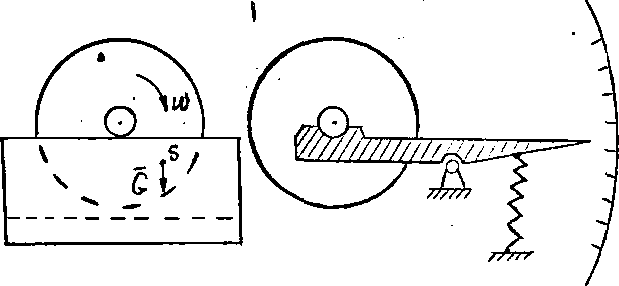
Рис 3.34. Балансировка на призмах Рис 3.35. Балансировка на пружинных весах
Динамическая неуравновешенность проявляется только при движении детали, поэтому динамическая балансировка выполняется только на движущейся детали.
Динамической балансировке подвергают детали большой длины и сложной формы, имеющие большую угловую скорость вращения.
Балансируют на специальных балансировочных станках и машинах различных конструкций.
При вращении деталь раскачивает основание, на котором закреплена, и по картине колебаний основания устанавливают величину неуравновешенности.
Станки и машины оснащены реагирующими приборами и электроникой, по которой устанавливают величину неуравновешенности.
В последнее время широкое распространение получили машины, имеющие возможность балансировать деталь при ее вращении путем напыления или испарения металла с помощью лазера.
Эти машины в сотни раз сокращают время и повышают точность балансировки, существенно повышают производительность труда и высвобождают людские резервы.
Лекция 14
План лекции.
3.7.5. Общие условия уравновешивания механизмов.
3.7.6. Уравновешивание шарнирного четырехзвенника.
3.8. Движение машины под действием заданных сил.
3.8.1. Режимы движения машины,
3.8.2. Характеристика внешних сил.
3.7.5. Общие условия уравновешивания механизмов.
Эту задачу рассмотрим на примере шарнирного четырехзвенного механизма.
При вращении ведущего звена общий центр масс механизма перемещается по замкнутому пути. Вследствие этого главный вектор и главный момент сил инерции периодически меняются по величине и направлению, возникающие при этом силы инерции передаются через стойку на фундамент, вызывая его быстрый износ, а в некоторых случаях могут привести к аварии.
Задача уравновешивания механизма сводится к уравновешиванию сил инерции его подвижных звеньев, т.е. к выполнению условий.
|
|
(3.33) |
В сложной машине, если эти условия выполняются для каждого из механизмов, то они выполняются и для машины в целом. Поэтому для уравновешивания машин достаточно обеспечить уравновешивание сил инерции каждого из её механизмов.
Для механизмов с нелинейной функцией положения (рычажных, кулачковых) тождественное выполнение условий (3.33) оказывается в большинстве случаев невозможным. При уравновешивании таких механизмов обычно ограничиваются выполнением только первого условия. Такое уравновешивание называется статическим. Естественно, что такое частичное выполнение условий уравновешивания далеко не всегда оказывается эффективным. Силы, действующие на стойку, приводятся в этом случае к главному моменту, который может вызывать интенсивные угловые колебания машины.
Рассмотрим, какими способами можно обеспечить обращение в нуль главного вектора сил инерции механизма. Как известно из кинетостатики
|
|
(3.34) |
Где ms - суммарная масса всех звеньев;
as - ускорение центра масс системы.
Для
выполнения условия
![]() =0,
необходимо, чтобы as=0,
T.K.
ms0.
=0,
необходимо, чтобы as=0,
T.K.
ms0.
Таким образом, при неизменном положении общего центра масс механизм будет статически уравновешен.