

2.5.1. Определение положений точек в незамкнутых кинематических цепях.
Эта задача имеет самостоятельное значение для исследования механизмов манипуляторов и, кроме того. её решение может быть использовано для определения положений точек звеньев любых механизмов о замкнутыми кинематическими цепями.
Рассмотрим произвольную плоскую незамкнутую цепь, имеющую „n" подвижных звеньев (рис. 2.11) соединенных кинематическими парами пятого класса.
С
неподвижным звеном и с каждым подвижным
свяжем свою систему координат
![]()
Известны
длины всех звеньев и координаты точки
![]() в системе
в системе
![]() ,
а также заданы обобщенные координаты
,
а также заданы обобщенные координаты
![]()
Т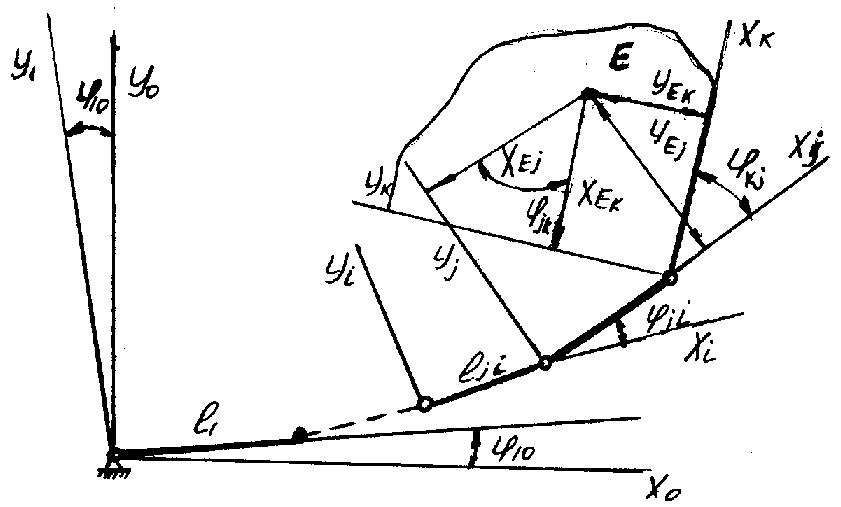 ребуется
определить положение точкиE
в неподвижной системе координат
ребуется
определить положение точкиE
в неподвижной системе координат
![]() ,
связанной со стойкой.
,
связанной со стойкой.
Рис. 2.11 Положение произвольной точки Е в незамкнутой кинематической цепи.
Для
решения этой задачи произведем
последовательный переход от координат
точки Е в системе ![]() к её координатам в системе
к её координатам в системе
![]() .
.
На
первом переходе определяем координаты
точки Е в системе ![]() .
.
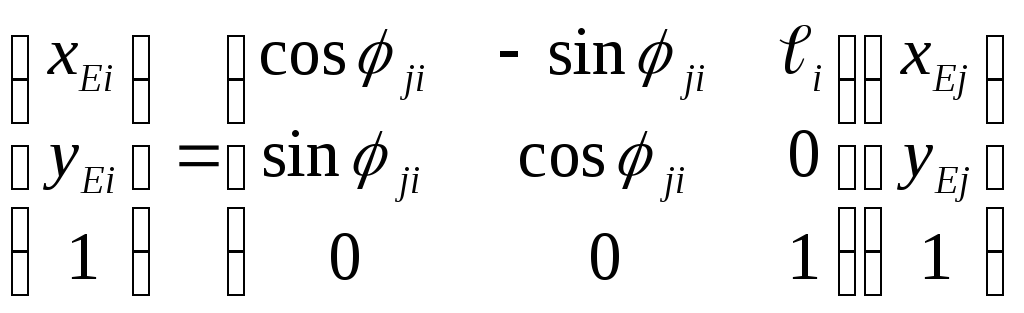
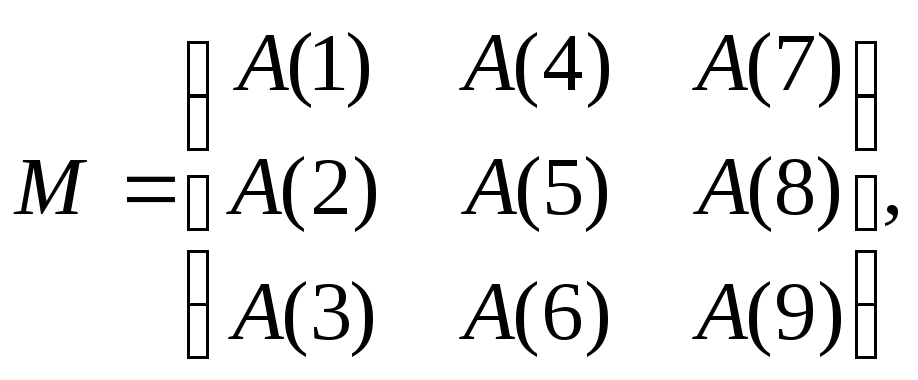
Уравнения преобразования координат при этом переходе в матричной форме
или
![]() (2.3)
(2.3)
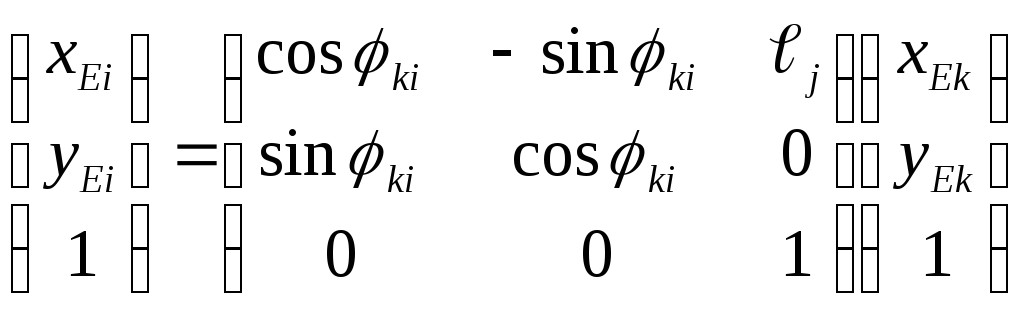
При втором переходе к системе
или
![]() (2.4)
(2.4)
Аналогично записываются уравнения преобразования
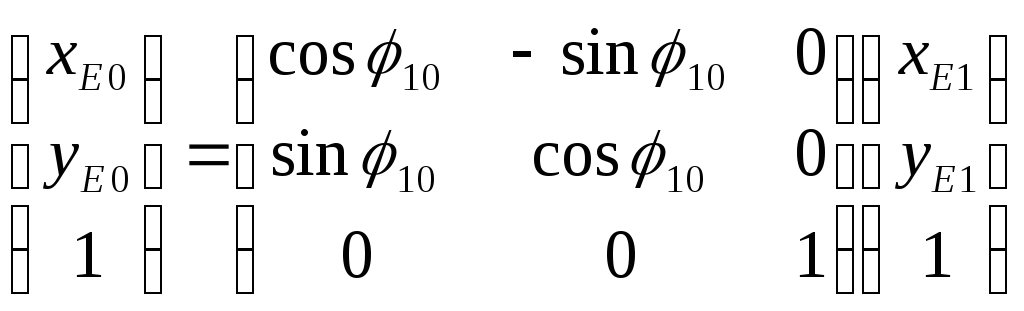
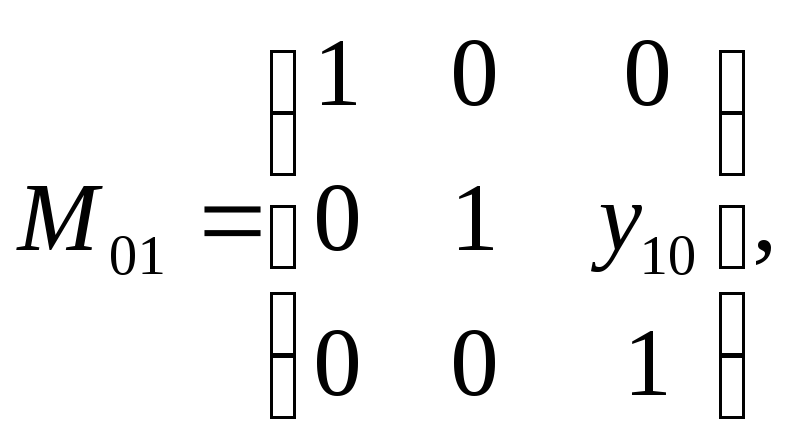
координат и на всех оставшихся переходах. Последний переход от системы S1 к. S0,
или
![]() (2.5)
(2.5)
Подставляя уравнение (2. 3 ) и ( 2.4) идалее в (2. 5) получим :
![]() (2.6)
(2.6)
Рассмотрим
схему механизма манипулятора» С
каждым звеном свяжем свою систему
координат. Известны геометрические
размеры звеньев механизма и определены:
обобщенные координаты:
![]() и координаты некоторой точки Е в системе
и координаты некоторой точки Е в системе
![]()
Т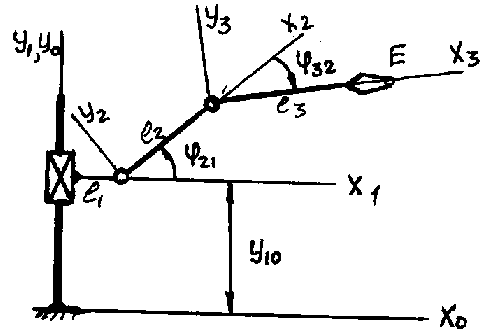 ребуется
определить положение
точки Е в
неподвижной системе координат
S0.
ребуется
определить положение
точки Е в
неподвижной системе координат
S0.
Для данной схемы в соответствии с формулой (2. 6)
![]()
Так
как
![]() и
и
![]()

 представим
представим
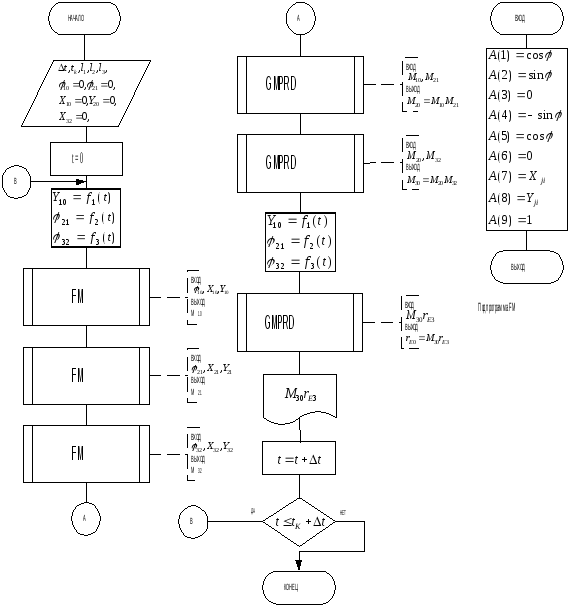
Полученные выражения могут быть использованы для составления алгоритма, блок-схема которого может быть построена по следующей схеме
2.5.2 Определение положений точек в замкнутых кинематических цепях.
Положение точки в замкнутой кинематической цепи определяете из условия замкнутости контуров.
Для этого выражают координаты точки через параметры правой и ле1 части контура и приравнивают эти параметры.
Р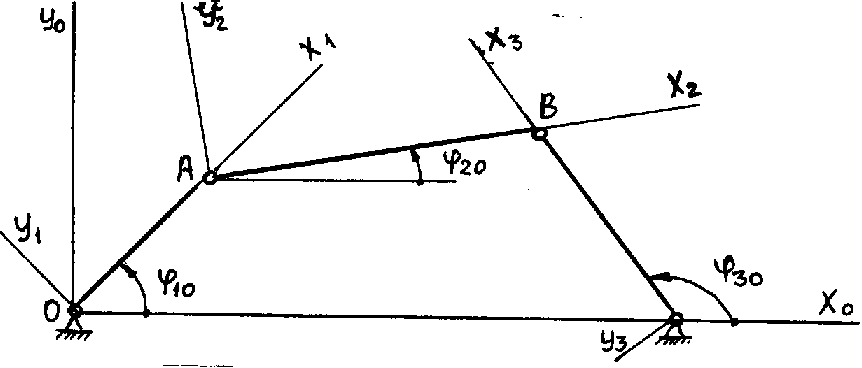 ассмотрим
плоскую замкнутую кинематическую цепь
на примере шарнирного четырехзвенника.0
ассмотрим
плоскую замкнутую кинематическую цепь
на примере шарнирного четырехзвенника.0
Рис 2. 12 Определение положения точки В в четырехзвенном шарнирном механизме.
С неподвижным и тремя подвижными звеньями свяжем свою систему координат
![]()
Известны
длины всех звеньев, координаты точки Е
в системах
![]() и
и
![]() и обобщенная
координата
и обобщенная
координата
![]() .
.
Требуется определить положение точки Е в системе S0, связанной со стойкой.
Для решения этой задачи произведем последовательный переход от координат точки Е в системе S2 кее координатам в системе S1 ,а затем и в системе S0 через параметры левой части контура ОAB.
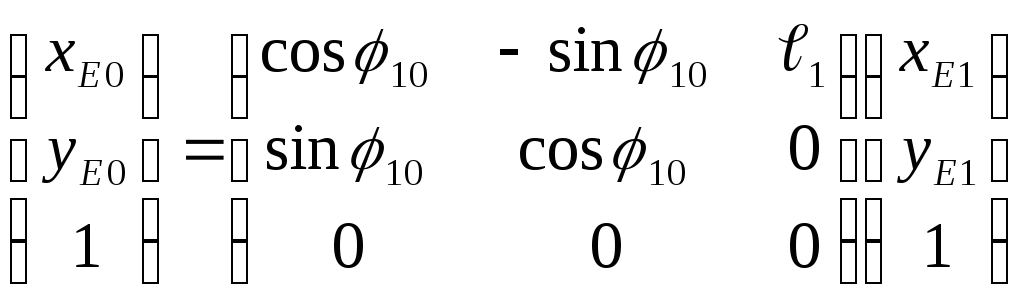
Первый переход описывается матричным уравнением
 т.
к.
т.
к.
![]() или
или
![]() (2.8)
(2.8)
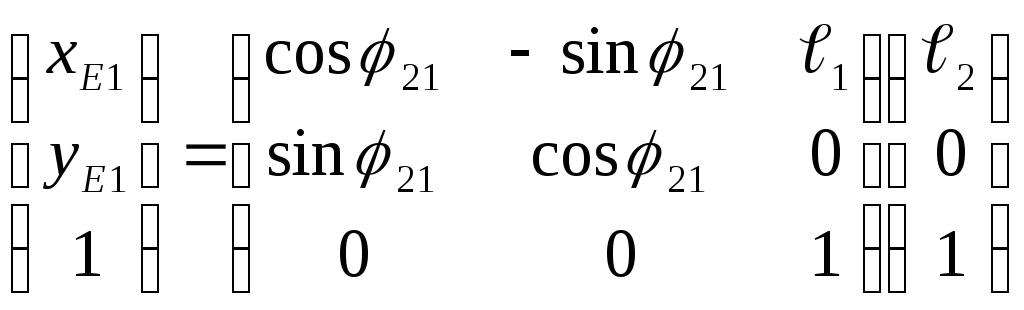
Второй
переход
 (2.9)
(2.9)
или
![]()
Полный
переход от системы
![]() к системе
к системе
![]()
![]()
Положение точки Е через параметры левой части контура ОСВ описывается матричным уравнением
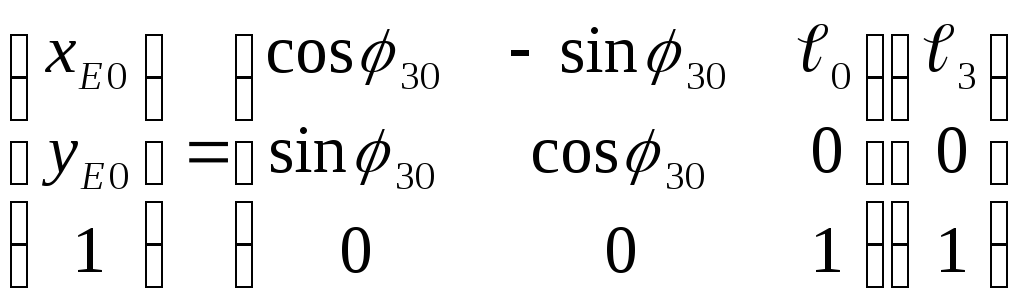 (2.10)
(2.10)
или
![]() (2.11)
(2.11)
Приравнивая правые части формул (2. 11) и (2.8, 2. 9), выраженные
через параметры правой и левой части контура получим:
![]() (2.
12)
(2.
12)
После подстановки матриц и действий с ними получим систему двух уравнений
![]()
где
![]()
Полученная
система уравнений позволяет найти
параметры
![]() и
и![]() ,
определяющие положение звеньев 2 и 3 в
зависимости от обобщённой координаты
,
определяющие положение звеньев 2 и 3 в
зависимости от обобщённой координаты
![]() ,
а затем и координаты любых точек этих
звеньев.
,
а затем и координаты любых точек этих
звеньев.
В общем случае для многозвенной замкнутой кинематической цепи координаты точки Е можно определить из уравнения
![]() (2.14)
(2.14)
Лекция 7
План лекции