

-
1.3. Оценивание параметров периодических сигналов по экспериментальным данным
При малом уровне помех метод наименьших квадратов может эффективно использоваться для разложения периодических функций в ряд Фурье, а также для оценивания коэффициентов ортогональных полиномов и различных ортогональных функций, в частности, полиномов Чебышева, Лежандра и др.
Ряды Фурье широко используются в настоящее время для решения важных практических задач. Например, в электроэнергетических системах наиболее эффективно передавать энергию при номинальных значениях частоты и напряжения. Однако в реальных условиях в энергосистемах возникают искажения синусоидальной формы кривых тока и напряжения. Поэтому необходимо отклонения форм кривых тока и напряжения от правильной синусоидальной формы оценивать по гармоническим составляющим периодических сигналов.
Предположим,
что в процессе обработки периодического
сигнала получены значения напряжения
через каждые 15° в контрольных точках.
Измерения произведены с точностью,
определяемой лишь одним знаком после
запятой. Полученные данные в интервале
изменения угла alf=
0°![]() 180°
сведены в таблицу 1.2, содержащую 13
экспериментальных
точек.
180°
сведены в таблицу 1.2, содержащую 13
экспериментальных
точек.
Таблица 1.2.
|
аlf(i) (град) |
0 |
15 |
30 |
45 |
60 |
75 |
90 |
105 |
120 |
135 |
150 |
165 |
180 |
|
u(i)(B) |
12.7 |
33.8 |
52.0 |
60.9 |
57.8 |
45.7 |
31.1 |
20.1 |
15.6 |
15.1 |
13.0 |
4.2 |
-12.7 |
B первой строке таблицы приведен угол alf(i) (в градусах), во второй - напряжение u(i) (в вольтах), i = 0, . . . , 12 .
Требуется по данным таблицы 1.2. определить амплитуды и фазы первых трех гармони периодического сигнала
![]() (1.22)
(1.22)
где 0 - частота первой гармоники.
Таким образом, требуется оценить амплитуды и фазы
U1m , Q1 ,
U2m , Q2 ,
U3m , Q3 .
Разделив период t на 24 равных интервала, мы получим . Так как , то каждому будет соответствовать угол (в градусах).
 .
.
Для
нахождения угла в i-ой
точке, где i=
0![]() 24,
можно воспользоваться простым
соотношением
24,
можно воспользоваться простым
соотношением
![]() i
= 0, …, 12,
i
= 0, …, 12,
на основании которого заполнена первая строка таблицы 1.2.
Из данных второй строки образуем вектор выхода
y1 = [12.7 33.8 52.0 … 4.2 -12.7]T
размерности (13Ч1).
Чтобы придать уравнению (1.22) вид модели (1.19), воспользуемся тождественным преобразованием
![]() (1.23)
(1.23)
![]()
![]()
Введем обозначения
![]()
![]()
![]()
![]()
![]()
![]()
Эти величины в уравнении (1.23) являются постоянными. u(0 t) является скалярной величиной. Она может быть получена в виде произведения двух векторов: вектор-строки [sin0 t cos 0 t sin 20 t cos 20 t sin 30 t cos 30 t] и вектор-столбца х, образованного из элементов
x = [x(1) x(2) x(3) x(4) x(5) x(6)]T , т.е
u(0
t) =[sin0
t cos 0
t sin 20
t cos
20
t sin 30
t cos
30
t]
![]()
Вектор x является искомым вектором, содержащим шесть неизвестных коэффициентов. Для их оценивания, согласно (1.10), требуется составить число уравнений т > 6. Мы выбрали т = 13 и привели эти данные в таблице 1.2.
C помощью вектор-строки приведенного выше уравнения сформируем матрицу H размерности (13Ч6), где каждая i-ая строка должна содержать значения элементов, соответствующие углу alf(i), приведенному в i- ой ячейке первой строки таблицы. B среде MatLAB эта операция выполняется в режиме прямых вычислений
alf=0:15:180;
bet = alf.*(pi/180);
H = [sin(bet)' cos(bet)' sin(2*bet)' cos(2*bet)'
sin(3*bet)' cos(3*bet)']
H =
0 1.0000 0 1.0000 0 1.0000
0.2588 0.9659 0.5000 0.8660 0.7071 0.7071
0.5000 0.8660 0.8660 0.5000 1.0000 0.0000
0.7071 0.7071 1.0000 0.0000 0.7071 -0.7071
0.8660 0.5000 0.8660 -0.5000 0.0000 -1.0000
0.9659 0.2588 0.5000 -0.8660 -0.7071 -0.7071
1.0000 0.0000 0.0000 -1.0000 -1.0000 0.0000
0.9659 -0.2588 -0.5000 -0.8660 -0.7071 0.7071
0.8660 -0.5000 -0.8660 -0.5000 0.0000 1.0000
0.7071 -0.7071 -1.0000 0.0000 0.7071 0.7071
0.5000 -0.8660 -0.8660 0.5000 1.0000 0.0000
0.2588 -0.9659 -0.5000 0.8660 0.7071 -0.7071
0.0000 -1.0000 0.0000 1.0000 0.0000 -1.0000
>>
Можно
убедиться, что H
имеет полный ранг: rank(Н)=6.
Поэтому
существует ее обратная матрица
![]() .
Следовательно, для оценки x
можно использовать уравнение (1.15).
.
Следовательно, для оценки x
можно использовать уравнение (1.15).
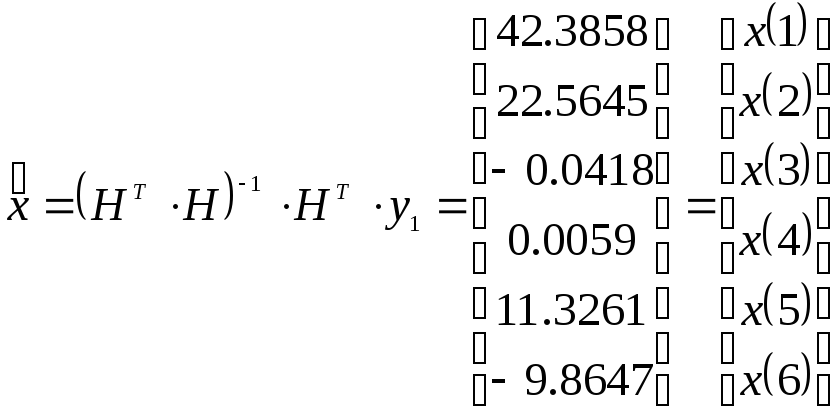
Используя выражения для x(l) и x(2), определим амплитуду первой гармоники U1m и фазу Q1
![]()
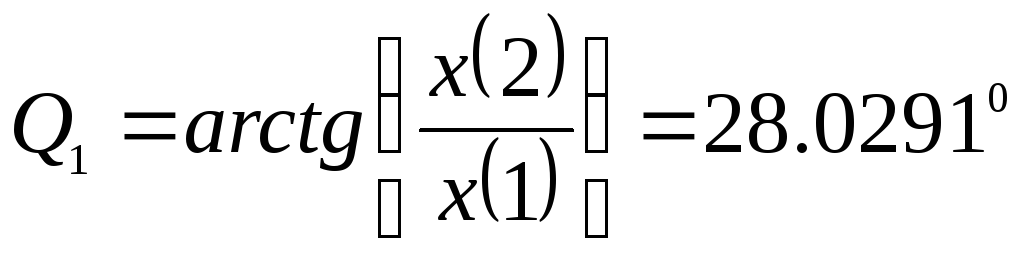
Угол Q1 (в градусах) найдем с помощью уравнения
Аналогично определим U2m, Q2, U3m и Q3

Следовательно, напряжение u(0 t), в соответствии с (1.22), может быть записано с помощью уравнения
![]() (1.24)
(1.24)
![]()
при условии, что 0 t имеет размерность "градусы".
B полученном уравнении (1.24) амплитуда напряжения первой гармоники более чем на два порядка превышает амплитуду второй гармоники. Поэтому при выполнении инженерных расчетов второй гармоникой можно пренебречь, а в величинах аргументов первой и третьей гармоник - учесть лишь десятые доли градуса. Тогда получим
![]() (1.25)
(1.25)
Все
приведенные выше расчеты в среде MaiLAB
могут
быть выполнены в режиме прямых
вычислений, без составления машинных
программ. B
случае автоматизации вычислительного
процесса необходимо иметь в виду, что
в составе вектора x*
могут быть элементы равные нулю. Если,
например,
![]() (3)и
(3)и
![]() (4)равны
нулю, то при получении U2m=0
из
цикла
должна
исключаться операция расчета Q2,
поскольку
(4)равны
нулю, то при получении U2m=0
из
цикла
должна
исключаться операция расчета Q2,
поскольку
![]() будет представлять собой неопределенность
типа 0/0, и последующие вычисления на
ПЭВМ прекратятся.
будет представлять собой неопределенность
типа 0/0, и последующие вычисления на
ПЭВМ прекратятся.
Чтобы оценить погрешность вычислений, вызванную ограничением разрядов чисел, содержащихся во второй строке таблицы 1.2, возвратимся к уравнению (1.26) — модели процесса, которая в действительности использована для получения экспериментальных данных и составления таблицы:
![]() (1.26)
(1.26)
Видно, что вторая гармоника в составе сигнала отсутствовала. Повысим точность измерений и представим вектор у следующими данными:
y = [l2.6937 33.7823 52.0270 60.8661 57.8116 45.7234 ...
31.0608 20.1415 15.5952 15.0802 12.9958 4.1658 -12.6937]Т
B этом случае у условно можно считать вектором детерминированных сигналов.
Чтобы убедиться практически в отсутствии шума в элементах у, оценим вновь искомые величины с помощью метода наименьших квадратов. B результате получим
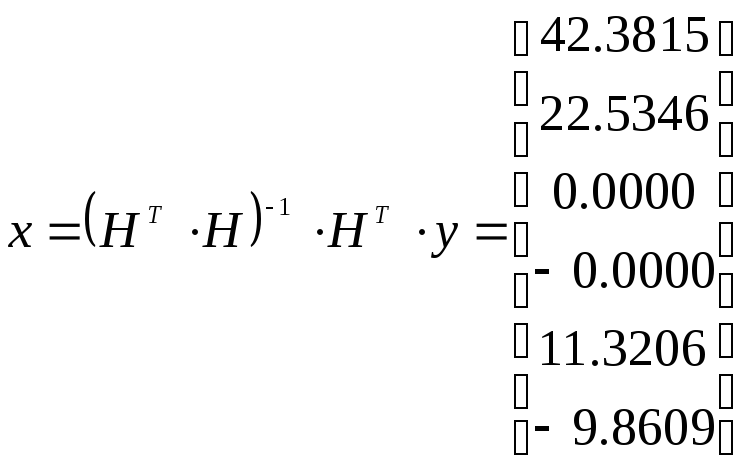 (1.27)
(1.27)
Используя элементы вектора-столбца (1.27) для оценки амплитуд и фаз гармоник, будем иметь
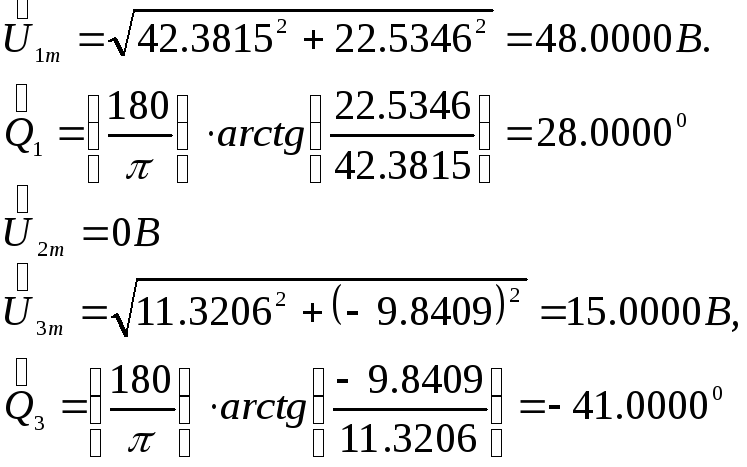
Таким образом, оценочные значения практически совпадают с принятыми исходными данными.
Теперь определим вектор шума z, представляющий собой разность между у и у1:
z = y – y1 = [-0.0063 -0.0177 0.0270 -0.0339 0.0116 0.0234 ...
-0.0392 0.0415 -0.0048 -0.0198 -0.0042 -0.0342 0.0063]T
Для оценки z используем критерий (1.13)
![]()
Аналогичный результат получим, если воспользуемся эвклидовой нормой согласно правилу (1.18). Вычисления в среде MatLAB выполним с помощью оператора
![]()
Заметим, что полученные величины J не характеризуют "качество" моделирования. Адекватность модели и объекта, представленного вектором y1, может быть установлена по вектору z1, где
z1 = y1 – yм= [-0.0056 0.0166 -0.0271 0.0309 -0.0150 -0.0223 ...
0.0462 -0.0330 0.0660 0.0091 -0.0166 0.0153 -0.0061]Т
Вектор
ум,
в
свою очередь, следует восстановить,
используя матрицу H
и вектор наилучшей оценки
![]()
yм
=
![]() = [l2.7056 33.7834 52.0271 60.8691 57.8150 45.7223 ...
= [l2.7056 33.7834 52.0271 60.8691 57.8150 45.7223 ...
31.0538 20.1330 15.5934 15.0909 13.0166 4.1847 -12.6939]T