

4. Модели пространства состояний в электрических цепях и системах
Для моделирования электрических цепей и динамических систем естественно использовать переменные состояния как обобщающие характеристики. Метод пространства состояний, базирующийся на применении матричного анализа, позволяет использовать фундаментальные положения высшей алгебры для эффективного решения прикладных задач. Основные преимущества метода пространства состояний реально проявляются уже на начальной стадии расчета - при составлении дифференциальных уравнений, описывающих переходные процессы в динамических системах с сосредоточенными параметрами [16].
Рассматривая физические процессы, которые могут быть адекватно описаны системами алгебраических или обыкновенных дифференциальных уравнений в матричной форме, мы остановимся на анализе динамики электрических цепей и простых динамических систем.
Наряду с возможностями получения решения уравнений состояния в аналитическом виде, мы рассмотрим технические приемы составления уравнений, их преобразования, а также машинные методы качественного и количественного анализа динамики моделей и систем.
4.1. Понятие состояния
Предположим, что состояние системы может быть описано n-мерным вектором:
![]() (4.1)
(4.1)
содержащим
п
компонент,
являющихся функциями времени t.
Пространством
состояний
системы
является пространство, в котором
базисный
вектор
может быть выбран из множества векторов
![]()
Если моделируемая система допускает аналитическое описание процессов в терминах пространства состояний с помощью обыкновенных дифференциальных уравнений, то уравнения состояния можно привести к стандартной форме:
![]() (4.2)
(4.2)
![]() (4.3)
(4.3)
где
![]() - вектор
управления размерности (rl);
- вектор
управления размерности (rl);
![]() - вектор
выхода размерности (m1),
причем т
п. В
общем, нелинейные вектор - функции
- вектор
выхода размерности (m1),
причем т
п. В
общем, нелинейные вектор - функции
![]() и
и
![]() ,
имеющие соответствующие размерности,
являются однозначными.
,
имеющие соответствующие размерности,
являются однозначными.
Можно
полагать, что состояние системы, как
понятие, содержит всю информацию о
поведении системы в прошлом и позволяет
оценить это поведение в будущем как
реакцию на заданный входной сигнал.
Так, если состояние системы описывается
линейными дифференциальными уравнениями
с постоянными коэффициентами, то решение
может быть определено состоянием в
начальный момент t0,
т.е. вектором
![]() .
.
Способы записи уравнений состояния различны, для различных физических систем и определяются удобствами анализа систем в конкретных условиях.
Математическая модель состояния стационарной линейной системы представляется матричным дифференциальным уравнением вида [2]:
![]() (4.4)
(4.4)
![]()
![]() (4.5)
(4.5)
где А, В, С и D - матрицы соответствующих размерностей, элементы которых являются постоянными коэффициентами.
Интегрирование
(4.4) при начальных условиях
![]() позволяет получить:
позволяет получить:
![]() (4.6)
(4.6)
Рассмотрим составление уравнений на примере динамической системы второго порядка.
Из курса физики известно, что если тело массой т движется в среде с сопротивлением и сопротивление, действующее на тело, пропорционально скорости движения (демпфирующая сила), то уравнение движения такой неконсервативной системы:
![]() (4.7)
(4.7)
где х - смещение тела, К и Сх - постоянные коэффициенты, F(t) - сила, воздействующая на тело от внешнего источника.
Уравнение (4.7) можно записать в терминах пространства состояний.
Введем
вектор
![]() и
обозначим
и
обозначим
![]() .
.
Тогда динамическую систему (4.7) можно представить в виде двух дифференциальных уравнений первого порядка:
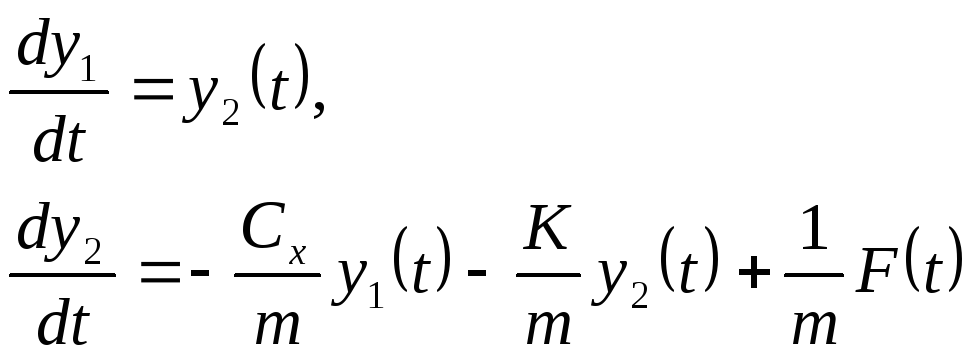
которые нетрудно записать в матричной форме, используя введенный вектор состояния.
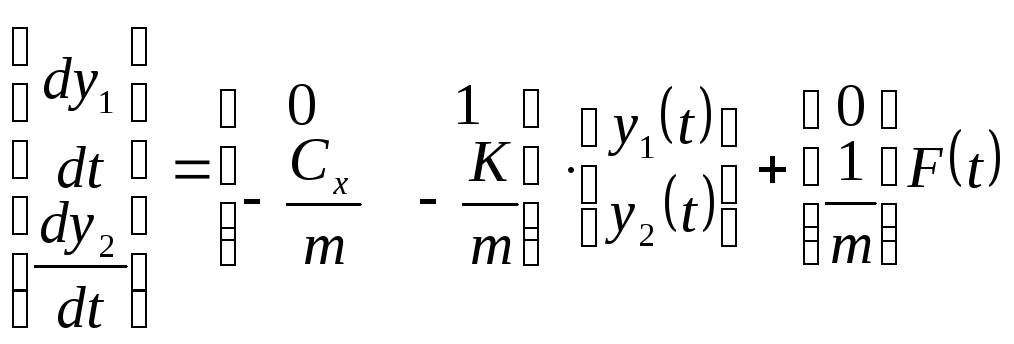 (4.8)
(4.8)
Сопоставив уравнение (4.8) с математической моделью состояния (4.4), мы можем убедиться, что (4.8) является стационарной системой.
Метод пространства состояний обеспечивает упорядоченный подход к нахождению состояния системы как функции времени, базирующийся на решении дифференциальных уравнений в матричной форме.
Под переменными состояния обычно понимают величины, определяющие энергетическое состояние системы. Их значения полагают известными к началу процесса